






La cirugía robótica está tomando protagonismo en los últimos años en el abordaje de la dolencia oncológica colorrectal. Sin embargo, no existen todavía estudios que muestren ventajas objetivas de este tipo de abordaje.
Presentamos un estudio prospectivo, aleatorizado cuyo objetivo es comparar los resultados a corto plazo entre la cirugía robótica y la cirugía laparoscópica colorrectal.
Material y métodoEntre enero de 2008 y enero de 2009, 56 pacientes diagnosticados de cáncer colorrectal fueron aleatorizados y asignados al grupo de cirugía robótica o laparoscópica. Se compararon la edad, el índice de masa corporal, la localización tumoral, las conversiones de cada grupo, las complicaciones intra- y postoperatorias y las características histológicas de las piezas obtenidas.
ResultadosNo hubo diferencias significativas en la edad (p=0,055), el índice de masa corporal (p=0,12), o la localización tumoral (p=0,91). Sólo un paciente precisó ser transfundido en el grupo robótico y ninguno en el grupo laparoscópico. El porcentaje de conversiones fue idéntico en ambos grupos, sin embargo el tiempo de preparación y el tiempo operatorio sí fue significativamente mayor en los pacientes intervenidos mediante el dispositivo robótico (p=0,0001 y p=0,017 respectivamente). No existieron diferencias en cuanto al índice de complicaciones ni el porcentaje de reintervenciones (14,2% y 7,1%). La estancia media de los pacientes fue de 9,3±8,1 días en el grupo robótico y de 9,2±6,8 días en el laparoscópico (p=0,79). El margen distal de resección fue mayor en el espécimen obtenido mediante cirugía robótica (p=0,003) así como el número de ganglios obtenidos de la pieza (p=0,23).
ConclusiónLa cirugía robótica colorrectal fue llevada a cabo de manera segura y efectiva con iguales resultados clínicos.
El número de registro internacional para este estudio es: ISRCTN60866560.
Robotic-assisted surgery is playing an increasingly important role in the last few years in the treatment of colorectal oncological disease. However, there are still no studies that objectively demonstrate the advantages of this type of surgery.
We present a prospective randomised study in order to compare the short-term results between colorectal robotic surgery and laparoscopic surgery.
Material and methodA total of 56 patients diagnosed with colorectal cancer between January 2008 and January 2009, were randomised and assigned to the robotic or laparoscopic group. Age, body mass index, tumour location, conversions in each group, complications during and after surgery, and histological characteristics of the specimens obtained, were all compared.
ResultsThere were no significant differences between age (P=.055), body mass index (P=.12), or tumour location (P=.91). Only one patient in the robotic group required a transfusion and none in the laparoscopic group. The percentage of conversions was the same in both groups, however, the preparation times and operating times were significantly longer in patients intervened using the robotic device (P=.0001 and P=.017, respectively). There were no differences as regards the rate of complications or in the percentage of re-interventions (14.2% and 7.1%). The mean hospital stay of the patients was 9.3 (8.1) days in the robotic group and 9.2 (6.8) days in the laparoscopic (P=.79). The distal resection margin was greater in the specimen obtained using robotic surgery (P =.003) as well as the number of lymph nodes obtained in the specimen (P =.23).
ConclusionRobotic colorectal was performed safely and effectively, and with similar clinical results.
International Trial Number for this study is: ISRCTN60866560.
La cirugía laparoscópica como medio de abordaje de la dolencia gastrointestinal presenta múltiples ventajas como reducción del dolor postoperatorio y de la estancia media postoperatoria, mejora los resultados estéticos y restablece más rápidamente el tránsito intestinal1–3. Sin embargo se han documentado algunas desventajas inherentes a la cirugía laparoscópica como la pérdida de la visión tridimensional, la necesidad de utilizar instrumentos más largos que aumentan el temblor de la mano del cirujano, la pérdida de movimientos respecto a la muñeca humana ya que sólo permite 4 grados de libertad y la falta de intuición de los movimientos debido al efecto palanca que los trócares ejercen sobre los instrumentos.
Teóricamente, los sistemas robóticos ofrecen una solución para superar algunas de estas limitaciones. Actualmente, estos dispositivos quirúrgicos son muy sofisticados y han demostrado sus ventajas en numerosas subespecialidades quirúrgicas. De todos ellos, el robot da Vinci® (Intuitive Surgical, Sunnyvale, CA, USA) es el más extendido y el único aprobado por la FDA para realizar cirugía abdominal.
Cadiére et al4,5 fueron los primeros en describir una cirugía colorrectal robótica en tres pacientes en el año 2001. Desde entonces, numerosas publicaciones han demostrado múltiples ventajas técnicas en la cirugía colorrectal robótica sobre la cirugía laparoscópica convencional: mejora en la visión, estabilidad de la plataforma de la cámara, la libertad de movilidad de los instrumentos y la precisión en las suturas manuales6. Sin embargo, la experiencia en la cirugía colorrectal robótica es aún limitada; existen pocos estudios prospectivos aleatorizados que comparen la cirugía colorrectal robótica frente a la cirugía laparoscópica convencional, con pocos casos y sin resultados concluyentes.
Por este motivo, nosotros presentamos un estudio prospectivo y aleatorizado cuyo objetivo primario es demostrar la seguridad de la cirugía colorrectal robótica y secundariamente la factibilidad en comparación con la cirugía colorrectal laparoscópica convencional en el tratamiento del cáncer de recto y sigma.
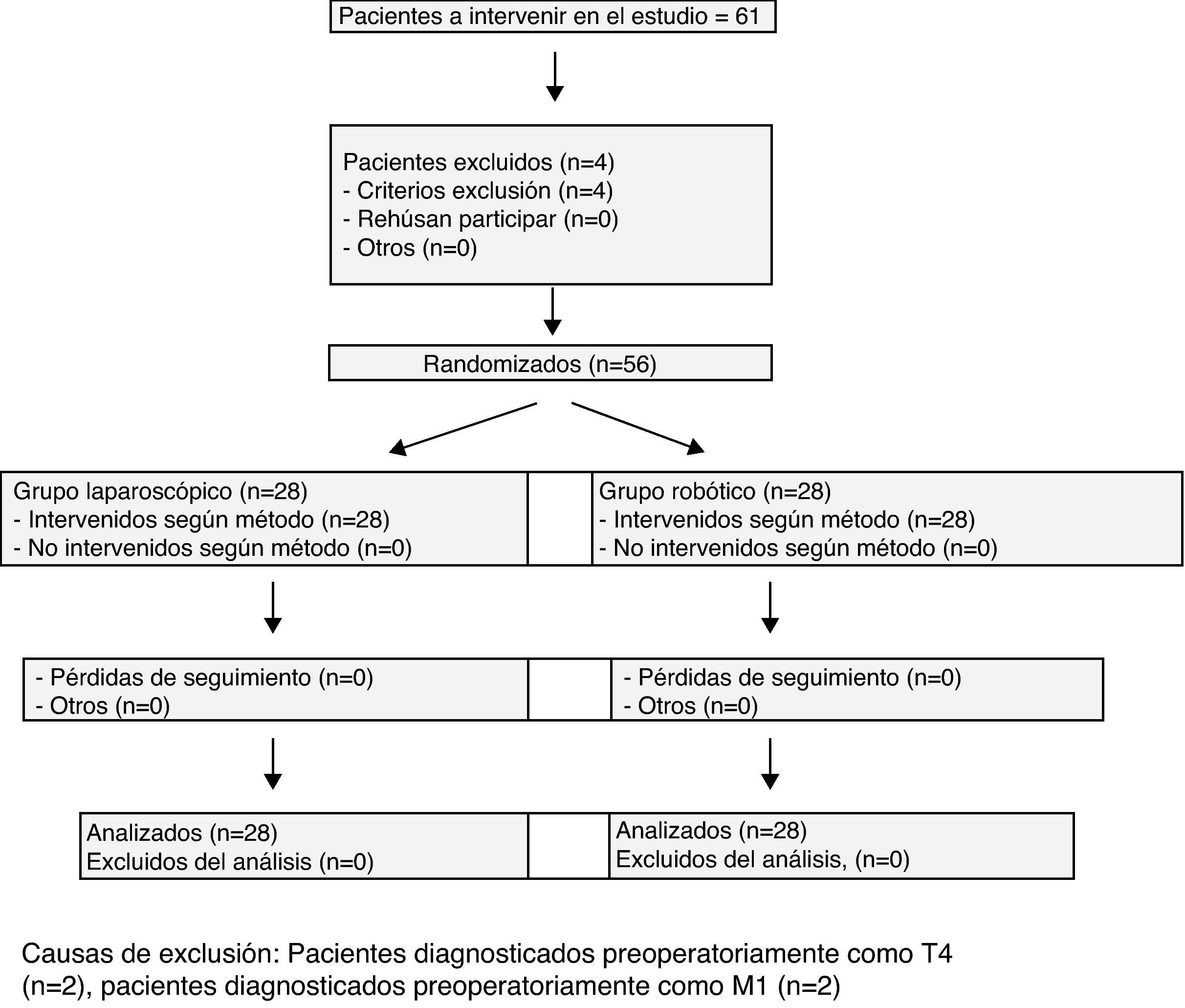
Material y métodoDesde el inicio del programa de cirugía robótica en enero de 2008 hasta enero de 2009, fueron intervenidos 298 pacientes en el Hospital Universitario (HU) Virgen del Rocío por cáncer colorrectal. De ellos 56 casos de cáncer colorrectal localizados en sigma y recto fueron asignados de forma aleatoria mediante una secuencia que se elaboró a través de un programa computacional y distribuidos entre los grupos de cirugía colorrectal robótica y laparoscópica (fig. 1). Todos los pacientes fueron intervenidos por tres cirujanos con experiencia en cirugía laparoscópica y robótica (J.D.P., E.P.S, H.C.D.).

De forma preoperatoria todos los pacientes fueron sometidos a una analítica completa, con hemograma, bioquímica y función hepática, radiografía de tórax y electrocardiograma. En todos los pacientes se llevó a cabo una colonoscopia con toma de biopsia para el diagnóstico histopatológico de la lesión, junto con un TAC toracoabdominal y RMN y ecografía en aquellos pacientes diagnosticados de neoplasia rectal.
Se excluyó a todos aquellos pacientes diagnosticados como estadio T4 o M1, pacientes menores de 18 años y a todos aquellos que no aceptaron el consentimiento informado.
Las características demográficas de los pacientes (edad, peso, altura), la clasificación según la American Society of Anesthesiologists (ASA), el índice de masa corporal, el procedimiento quirúrgico, los resultados clínicos (tiempo de preparación del sistema quirúrgico, el tiempo operatorio, necesidad de transfusión de los pacientes, estancia hospitalaria, dolor en los días 1, 2 y al alta, según escala analógica visual manteniendo idéntico tratamiento analgésico en todos los pacientes, días hasta la ingesta y hasta la deambulación, días hasta la retirada del drenaje), complicaciones y conversiones, los resultados del análisis patológico de la pieza y las complicaciones postoperatorias fueron recogidas de forma prospectiva en la base de datos.
Los criterios de alta hospitalaria fueron restitución del tránsito intestinal, tolerancia a dieta oral y deambulación de los pacientes junto con la ausencia de datos de complicación (fiebre o dolor incontrolado).
Los resultados del análisis patológico incluyeron la distancia al margen distal, número de ganglios totales resecados y afectos y longitud total del espécimen.
Este estudio fue aprobado por el Comité Ético del Hospital Virgen del Rocío de Sevilla y por la Agencia de Evaluación de Tecnologías Sanitarias de la Junta de Andalucía. El consentimiento informado se obtuvo de todos los pacientes.
Técnica quirúrgicaProcedimiento robóticoSe realiza bajo anestesia general e intubación orotraqueal, con el paciente en posición de litotomía (Lloyd-Davies) y tras obtener el pneumoperitoneo con aguja de Verres en hipocondrio izquierdo manteniendo presiones intraabdominales de 12-14mmHg. El primer trocar (Covidien, Norwalk, CT, USA) se coloca en el ombligo (12mm) para la óptica. A continuación se lleva a cabo una revisión general de toda la cavidad para descartar enfermedad diseminada y poder así continuar con el procedimiento según el diseño del estudio. Se colocan 3 trócares robóticos de 8mm y uno más de 5mm (Covidien, Norwalk, CT, USA) para el ayudante (fig. 2).

En primer lugar se localiza y se liga la vena mesentérica inferior a nivel del ángulo de Treitz mediante endoGIA de 30mm (Covidien, Norwalk, CT, USA), continuando con una disección de medial a lateral del ángulo esplénico del colon. Se abre la transcavidad para obtener el descenso completo del colon. Tras localizar la arteria mesentérica inferior, se liga en la raíz mediante clips de silicona de tipo Hem-O-Lock (Weck Closure Systems, Triangle Park, North Carolina, USA) después de localizar el uréter. Se completa la disección de medial a lateral que se finaliza con la apertura del parietocólico izquierdo. En los casos de cáncer de recto se comienza el abordaje del recto superior con la apertura de la reflexión peritoneal y se continúa la escisión total o subtotal mesorrectal. Para la sección de la pieza se introduce endoGIA (Covidien, Norwalk, CT, USA) para completar el corte; la pieza se extrae mediante una incisión de asistencia de tipo Pfannestiel protegida por donde se coloca el yunque para que una vez fijado con una bolsa de tabaco realizada con monofilamento irreabsorbible de 2/0 se reintroduzca para la anastomosis. Esta anastomosis se efectúa mediante una grapadora circular de 29 o 31mm tipo CEEA (Covidien, Norwalk, CT, USA) bajo visión directa laparoscópica. En todos los casos se comprueba que no existe fuga mediante una prueba de introducción de émbolos de aire con sello de agua. Sistemáticamente se deja drenaje yuxtaanastomótico.
Procedimiento laparoscópicoCon el paciente en idénticas condiciones se colocan 5 trócares (Covidien, Norwalk, CT, USA) de 12, 10, 10 y 2 trócares de 5mm. Los pasos quirúrgicos son superponibles a los realizados mediante cirugía robótica con ligadura de la vena inferior mesentérica a nivel del ángulo de Treitz, ligadura de la arteria mesentérica inferior en su raíz y disección de medial a lateral del mesocolon. Se realiza la sección del parietocólico izquierdo y escisión total o subtotal mesorrectal (según localización del tumor) tras la apertura de la reflexión peritoneal en los casos de tumores localizados por debajo de los 15cm. El recto es seccionado con endoGIA (Covidien, Norwalk, CT, USA) 45mm y extraído mediante incisión de Pfannestiel. Se coloca el yunque en el extremo distal del colon tras sección de pieza y se realiza la anastomosis bajo visión directa laparoscópica con comprobación de la estanqueidad con el mismo sistema que en la cirugía robótica. Para finalizar se deja drenaje yuxtaanastomótico.
Análisis estadísticoPara el estudio estadístico se utilizó el programa informático Statistical Product and Service Solutions (SPSS) 11.5 para Windows (SPSS Inc. Chicago, IL, USA). El tamaño de la muestra se calculó según la fórmula para la clase de muestreo empleado, con un nivel de confianza del 95%, siendo este de al menos 28 pacientes por cada brazo del estudio.
En el estudio descriptivo las variables cuantitativas que seguían una distribución normal se definieron por media y desviación estándar. Las variables cualitativas se definieron por número de casos y porcentajes. En el estudio analítico, las variables cuantitativas de ambas muestras se analizaron con el método de la t de Student para variables independientes. Se consideró significación estadística si p<0,05.
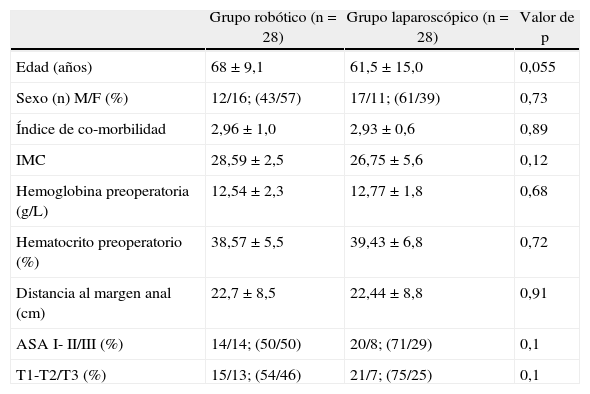
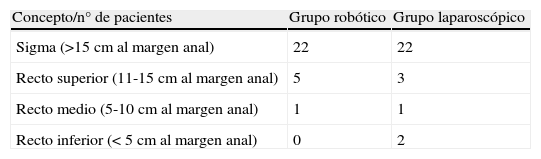
ResultadosCaracterísticas de los pacientesAnalizamos las características de los pacientes, comparando el grupo robótico con el grupo laparoscópico. Un total de 28 pacientes fueron incluidos en cada grupo (tablas 1 y 2). No hubo diferencias según el sexo (p=0,73) ni la distribución según el estadio preoperatorio de los pacientes (p=0,1). La edad media (p=0,055), el índice de masa corporal (p=0,12), la clasificación ASA (p=0,1) ni la localización de la neoplasia en cm respecto al margen anal (p=0,91) presentaron diferencias significativas entre ambos grupos (tablas 3 y 4).
Características de la población sometida a estudio: resultados expresados en media±desviación estándar y en porcentajes
| Grupo robótico (n=28) | Grupo laparoscópico (n=28) | Valor de p | |
| Edad (años) | 68±9,1 | 61,5±15,0 | 0,055 |
| Sexo (n) M/F (%) | 12/16; (43/57) | 17/11; (61/39) | 0,73 |
| Índice de co-morbilidad | 2,96±1,0 | 2,93±0,6 | 0,89 |
| IMC | 28,59±2,5 | 26,75±5,6 | 0,12 |
| Hemoglobina preoperatoria (g/L) | 12,54±2,3 | 12,77±1,8 | 0,68 |
| Hematocrito preoperatorio (%) | 38,57±5,5 | 39,43±6,8 | 0,72 |
| Distancia al margen anal (cm) | 22,7±8,5 | 22,44±8,8 | 0,91 |
| ASA I- II/III (%) | 14/14; (50/50) | 20/8; (71/29) | 0,1 |
| T1-T2/T3 (%) | 15/13; (54/46) | 21/7; (75/25) | 0,1 |
Resultados expresados como media±desviación estándar.
F: Femenino; IMC: índice de masa corporal; M: Masculino.
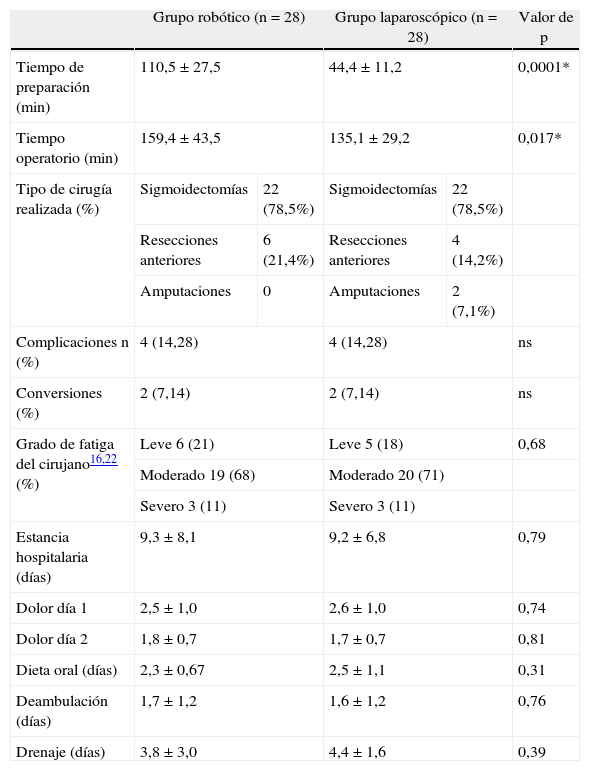
Características clínicas perioperatorias: resultados expresados en media±desviación estándar y en porcentajes
| Grupo robótico (n=28) | Grupo laparoscópico (n=28) | Valor de p | |||
| Tiempo de preparación (min) | 110,5±27,5 | 44,4±11,2 | 0,0001* | ||
| Tiempo operatorio (min) | 159,4±43,5 | 135,1±29,2 | 0,017* | ||
| Tipo de cirugía realizada (%) | Sigmoidectomías | 22 (78,5%) | Sigmoidectomías | 22 (78,5%) | |
| Resecciones anteriores | 6 (21,4%) | Resecciones anteriores | 4 (14,2%) | ||
| Amputaciones | 0 | Amputaciones | 2 (7,1%) | ||
| Complicaciones n (%) | 4 (14,28) | 4 (14,28) | ns | ||
| Conversiones (%) | 2 (7,14) | 2 (7,14) | ns | ||
| Grado de fatiga del cirujano16,22 (%) | Leve 6 (21) | Leve 5 (18) | 0,68 | ||
| Moderado 19 (68) | Moderado 20 (71) | ||||
| Severo 3 (11) | Severo 3 (11) | ||||
| Estancia hospitalaria (días) | 9,3±8,1 | 9,2±6,8 | 0,79 | ||
| Dolor día 1 | 2,5±1,0 | 2,6±1,0 | 0,74 | ||
| Dolor día 2 | 1,8±0,7 | 1,7±0,7 | 0,81 | ||
| Dieta oral (días) | 2,3±0,67 | 2,5±1,1 | 0,31 | ||
| Deambulación (días) | 1,7±1,2 | 1,6±1,2 | 0,76 | ||
| Drenaje (días) | 3,8±3,0 | 4,4±1,6 | 0,39 | ||
Resultados expresados como media±desviación estándar.
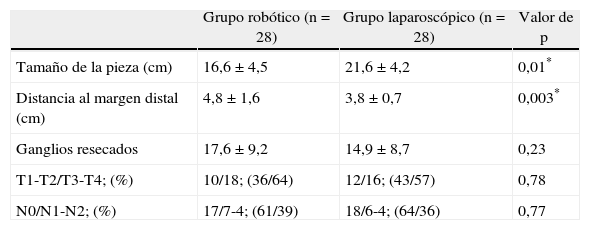
Resultados anatomopatológicos: resultados expresados en media±desviación estándar y en porcentajes
| Grupo robótico (n=28) | Grupo laparoscópico (n=28) | Valor de p | |
| Tamaño de la pieza (cm) | 16,6±4,5 | 21,6±4,2 | 0,01* |
| Distancia al margen distal (cm) | 4,8±1,6 | 3,8±0,7 | 0,003* |
| Ganglios resecados | 17,6±9,2 | 14,9±8,7 | 0,23 |
| T1-T2/T3-T4; (%) | 10/18; (36/64) | 12/16; (43/57) | 0,78 |
| N0/N1-N2; (%) | 17/7-4; (61/39) | 18/6-4; (64/36) | 0,77 |
Resultados expresados como media±desviación estándar.
La media de tiempo operatorio fue de 159,4±43,5min en el grupo robótico y de 135,1±29,2min en el grupo laparoscópico. Sólo un paciente precisó transfusión en el grupo robótico y ninguno en el grupo laparoscópico.
Tanto el tiempo que los pacientes tardaron en deambular y en tener una ingesta oral como el dolor postoperatorio fueron similares en ambos grupos. No hubo diferencias en cuanto a las conversiones que fueron debidas a infiltración tumoral y dificultades técnicas en el grupo laparoscópico y a obesidad y por tratarse de un tumor de gran tamaño en el grupo robótico.
La estancia postoperatoria que fue de 9,3±8,1 días en el grupo robótico y de 9,2±6,8 días en el grupo laparoscópico, tampoco mostró diferencias significativas.
La tasa de complicaciones postoperatorias fue del 14,28% en ambos grupos. Rectorragia (n=1), trombosis venosa profunda (n=1), obstrucción intestinal por hernia interna (n=1) que precisó reintervención y una dehiscencia (n=1) que también precisó intervención fueron las complicaciones documentadas en el grupo laparoscópico. En el grupo robótico se registraron sangrado por anastomosis (n=1) que necesitó intervención urgente, crisis HTA (n=1) que cursó con traumatismo craneoencefálico por caída accidental y requirió ingreso prolongado, fuga anastomótica (n=1) que se trató de forma conservadora y hernia inguinal estrangulada (n=1) que requirió intervención urgente. Un paciente en el grupo laparoscópico presentó infección de la herida quirúrgica. La tasa de mortalidad fue del 0% en ambos grupos.
Resultados anatomopatológicos (tabla 4)El número medio de ganglios linfáticos que se obtuvo por cada grupo fue de 17,6±9,2 en el grupo robótico y de 14,9±8,7 en el grupo laparoscópico (p=0,23). La distancia media de la resección del margen distal fue de 4,8±1,6cm en el grupo robótico y de 3,8±0,7cm en el grupo laparoscópico con diferencias significativas entre los dos grupos. En todos los demás parámetros las diferencias no fueron significativas.
DiscusiónDesde que Ballantyne et al7 llevaron a cabo la primera colectomía robótica en 2001, la publicación de esta técnica ha ido aumentando. Esta experiencia con robots en cirugía colorrectal ha descrito varias ventajas tanto sobre el abordaje tradicional como el laparoscópico: la visión tridimensional del campo operatorio, una plataforma estable para la cámara y la libertad de movimientos gracias a instrumentos articulados con una capacidad de articulación similar a la mano humana6.
Se ha postulado que estas características pueden facilitar determinados pasos en la cirugía colorrectal y disminuir así los índices de conversión, como por ejemplo el descenso del ángulo esplénico8–10, la disección de los vasos mesentéricos inferiores11–13, la preservación de los plexos nerviosos8,11,14,, la disección y movilización del recto en pelvis estrechas8,10–14 o las suturas8. Por estos motivos es en la cirugía del cáncer de recto donde la cirugía robótica ha acaparado especial atención13, como solución a algunos de los problemas de la escisión total mesorrectal laparoscópica, especialmente los que hacen referencia a la dimensión reducida de la pelvis o disminución de la destreza manual de los instrumentos laparoscópicos.
Otra ventaja añadida puede ser la disminución del grado de fatiga; algunos estudios15,16 han descrito el daño físico que supone la laparoscopia para el propio cirujano que adopta posturas antiergonómicas que pueden producir cansancio y daños musculoesqueléticos. La robótica permite la reducción del estrés físico y permite también que el cirujano adopte posturas más fisiológicas ya que permanece cómodamente sentado durante la cirugía.
Por todas estas razones parece claro que la cirugía colorrectal asistida por robot tiende a implementarse de forma constante y progresiva17 aunque la literatura disponible en este momento incluye muy pocos estudios y cada uno de ellos con pocos casos y bajo nivel de evidencia.
Si consideramos la duración de los procedimientos robóticos vemos que al igual que en nuestro estudio, tres trabajos presentan un aumento de la duración de la cirugía en comparación con la asistencia laparoscópica11,18,19. Cabe destacar el mínimo aumento del tiempo quirúrgico que se documenta en los procesos pélvicos más complejos. La mayor parte de estas publicaciones atribuyen este aumento de tiempo a la necesidad del cambio de situación del dispositivo para realizar la escisión total mesorrectal; sin embargo nosotros realizamos todo el procedimientos con el sistema robótico, por lo que no necesitamos cambiar el sistema de sitio con respecto al paciente y a pesar de ello mantuvimos tiempos superiores en la cirugía robótica. No obstante, se ha observado también que los tiempos quirúrgicos y de preparación del sistema disminuyen tras los primeros casos iniciales.
En los datos publicados que hacen referencia a la estancia media postoperatoria14, existen algunos autores que sugieren que es menor en el grupo robótico; esto podría deberse a un menor daño durante la disección pélvica. En nuestro trabajo la estancia media postoperatoria es similar en ambos grupos probablemente porque los tumores presentaban una localización más alta y por lo tanto la disección pélvica no fue necesaria en todos los casos.
Al igual que en la literatura existente14, en el presente estudio tampoco se han encontrado diferencias significativas en cuanto a la pérdida de sangre de los pacientes.
Las complicaciones que encontramos no fueron consecuencia del sistema robótico; sólo dos en cada grupo precisaron intervención quirúrgica (obstrucción intestinal y dehiscencia en el grupo laparoscópico y hernia estrangulada y sangrado de la anastomosis en el grupo robótico), sin que existiera mortalidad en ninguno de los grupos. Si revisamos todas las complicaciones publicadas producidas durante la cirugía colorrectal robótica sólo dos de estos casos pueden ser directamente imputados al robot6,8,11,18,19; ambos casos fueron debidos a daños producidos por la ausencia de sensación táctil y pérdida del control de la fuerza con la que traccionan las pinzas robóticas, aunque la falta de sensación táctil, tal y como Baik et al20 proponen, puede superarse mediante el uso de pequeños trucos visuales durante la cirugía.
Las principales desventajas de la laparoscopia, como la inestabilidad de la plataforma de la cámara, que puede hacer perder el campo quirúrgico con un mínimo movimiento inesperado, o la limitación de movimientos de los instrumentos, hacen que la disección quirúrgica sea compleja, sobre todo, en el caso de la pelvis en el cáncer de recto. Estos inconvenientes, junto con el gran tamaño de algunas de las lesiones, son la causa principal de conversión. Debemos considerar también la dificultad en la transección del recto. Dadas las ventajas que el robot da Vinci aporta, debemos esperar una disminución de las tasas de conversión, aunque en nuestro caso fueron idénticas en ambos grupos: en el grupo laparoscópico las conversiones fueron debidas a dificultades técnicas, por los motivos ya comentados y por infiltración tumoral, mientras que en el grupo robótico las conversiones fueron debidas al alto índice de masa corporal de uno de los pacientes y al gran tamaño del tumor en otro.
Si nos centramos en los resultados oncológicos, varios autores han descrito similar longitud en la pieza quirúrgica8, superponible número de ganglios linfáticos11–15 y parecida distancia desde el tumor al margen distal de la pieza11,14,15. Nosotros compartimos tanto el tamaño de la pieza como el número de ganglios linfáticos resecados, sin embargo en nuestra experiencia, la cirugía robótica permitió obtener márgenes distales más amplios con una diferencia significativa, probablemente debido a la mayor facilidad para la disección distal en campos de reducidas dimensiones, y teniendo en cuenta que en cuanto a la distribución por sexos no hubo diferencias en ambos grupos.
Uno de los mayores inconvenientes de la cirugía robótica es su coste; quizás por ello Pigazzi et al21 sugieren delimitar sus indicaciones a aquellas en las que realmente el robot aporte beneficios objetivos sobre la laparoscopia. También el gran tamaño del sistema, que en casos de urgencia puede ser difícil de manipular, puede convertirse en una desventaja durante la cirugía; no obstante, se está trabajando en nuevos sistemas que sean más ligeros y fáciles de manejar, de los que podremos disponer en un futuro muy próximo.
ConclusiónEl presente estudio demuestra que la cirugía colorrectal llevada a cabo con asistencia robótica es factible, segura y presenta resultados superponibles a los obtenidos mediante la asistencia laparoscópica convencional, ya que las tasas de complicaciones postoperatorias así como los índices de conversión fueron similares en ambos grupos.
No obstante, se necesitan aún estudios de seguimiento a más largo plazo para determinar si estos datos se corresponden con una mayor supervivencia libre de enfermedad o si disminuyen los índices de recidiva local.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.
Este trabajo ha sido presentado en el Segundo Congreso Mundial de Cirugía Robótica celebrado en Chicago los días 1 y 2 de octubre de 2010.

