




Introducción
Los avances de la cirugía mínimamente invasiva han indiscutiblemente mejorado los desenlaces quirúrgicos en los últimos años.1 Las mejoras en el campo visual durante las cirugías, la reducción del estrés como respuesta al trauma que se genera en el procedimiento y menores tiempos de recuperación posoperatoria, mejores resultados cosméticos, han llevado a que los pacientes tengan la iniciativa de elegir la cirugía mínimamente invasiva como una alternativa viable para sus problemas de salud.2,3
La cirugía laparoscópica fue introducida a la urología pediátrica a finales de los años 70 por Cortesi y colaboradores quienes describieron su utilidad en la evaluación de testículos no palpables, desde ese entonces el abordaje convencional de la cirugía laparoscópica ha sido empleado para la realización de diferentes procedimientos quirúrgicos de urología pediátrica incluyendo orquidopexias, varicocelectomias, nefrectomías parciales, pieloplastias, reimplantación ureteral y cirugía reconstructiva de vejiga urinaria.4,5 No obstante la necesidad de tener habilidades avanzadas para la realización de estos procedimientos no ha impedido que la curva de aprendizaje sea mucho mejor y rápida en comparación con técnicas quirúrgicas previamente descritas.6
La palabra robot que derivada de la palabra checa "robota" que significa labor forzada, fue ganando popularidad en el ambiente médico después del juego de Karel Capek "Rossum's Univeral Robots" donde los científicos descubrieron el secreto de crear máquinas que semejaban seres humanos que luego irían a gobernar a la raza humana hasta su extinción.2
La incursión de la robótica en el campo de la cirugía general y posteriormente en la cirugía pediátrica urológica tuvo sus inicios bajo la promesa de mejorar la visualización del campo quirúrgico, el control y la precisión de los movimientos en los instrumentos usados y reducir la curva de aprendizaje comparada con la cirugía laparoscópica tradicional.2
Desde 1998, el Robot da vinci (intuitive Surgical Sunnyvale, CA) ha fomentado el desarrollo tecnológico de la cirugía robótica en adultos, demostrando resultados muy exitosos principalmente en especialidades como la cirugía cardiotorácica, gastrointestinal y urológica.7 A pesar que el sistema Zeus (Computer Motion, Goleta, CA) fue inicialmente disponible separadamente, su unión con el sistema da vinci resulto en el robot da vinci como único robot de uso clínico exclusivo.3,8
Hasta el final del milenio pasado realmente era poco el conocimiento que se tenia sobre la aplicación de la cirugía robótica en el campo de la urología; sin embargo, el interés de introducirla ya se había generado con anterioridad debido a los excelentes resultados mostrados en otras especialidades quirúrgicas.7,9 Fue entonces en el año 2000 cuando en la Universidad de Frankfurt llevaron a cabo los primeros 10 casos de prostatectomía total endoscópica telerobótica, cuyos encargados fueron los cirujanos Binder y Kramer.10
La aplicación ideal de la cirugía robótica en la población pediátrica esta en la necesidad de realizar procedimientos que requieren suturas muy delicadas como pieloplastias; sin embargo, el uso de esta tecnología ha sido reportado en una amplia gama de procedimientos pediátricos.3,11,12 A su vez, es de vital importancia mencionar que por diversos factores su uso desde sus inicios ha sido limitado entre los que se encuentran: la falta de recursos económicos, los elevados costos de mantenimiento de los equipos, la falta de desarrollo de instrumentos quirúrgicos de uso en población pediátrica y la disminución del espacio de trabajo en comparación con la población adulta (Figura 1 y Figura 2).4,13,14

Figura 1. Control de las manos en el sistema quirúrgico robótico da Vinci.

Figura 2. Consolas de control para los cirujanos del sistema quirúrgico robótico da Vinci.
Objetivo
Revisar la literatura disponible para describir el estatus actual de la cirugía robótica en urología pediátrica y sus perspectivas en el futuro cercano. De la misma manera, se intenta proveer una guía completa y concisa con bases netamente académicas para incentivar el desarrollo de este campo de la cirugía en otros países donde el desarrollo de estas técnicas quirúrgicas es menos avanzado.
Métodos
El campo de acción de la cirugía robótica en la urología pediátrica ha demostrado jugar un rol importante en el manejo de patologías quirúrgicas urológicas en pacientes pediátricos. Para resaltar los avances de los últimos tiempos en esta área se llevó a cabo una revisión de la bibliografía.
Se buscaron artículos en forma electrónica en Medline incluyendo cualquier tipo de artículo en inglés o en español con resumen y empleando las palabras claves robótica, cirugía, urología pediátrica, laparoscopia, infantes y pediatría. No se estableció una fecha como límite para el inicio de la búsqueda para dar cabida a la mayor cantidad de artículos posible, la búsqueda está actualizada hasta el día 29 de julio de 2011. Luego de realizada una exhaustiva revisión y análisis de los documentos obtenidos, sólo 19 son referenciados en este trabajo.
Técnica general de cirugía robótica en urología pediátrica
Comúnmente, la técnica de un acceso abierto es utilizada para la colocación de la cámara a través de un orificio de 12 mm. La cámara es insertada en un puerto en la zona superior del ombligo. La cavidad abdominal es insuflada con CO2 a una presión de 10 mmHg a 15 mmHg con el fin de poder observar el interior de la cavidad abdominal con buena visibilidad usando un telescopio de 0 grados. Generalmente se tiene disponible un segundo telescopio monocular de 5 mm pero sin la bondad te tener imágenes 3D como lo tiene el telescopio principal. Usualmente se utilizan dos trocares de 5 mm que son insertados en el abdomen para dar espacio a los brazos del robot.5,15
El dispositivo robótico se acopla desde el lado ipsilateral en la cirugía del tracto urinario superior o al pie de la cama en la cirugía del tracto urinario inferior y la orquidopexia, y los brazos del robot cumplen su misión. El robot cuenta con instrumentos que están disponibles en tamaños de 8 mm y 5 mm. Un cuarto brazo está disponible para agarrar y retraer. Se utilizan pinzas Maryland bipolares como pinza, dispositivos de gancho con función monopolar o tijeras curvas durante la disección. Con un porta-agujas robótico puede hacer más fácil la sutura. Las técnicas y la tecnología han evolucionado permitiendo los mismos resultados y la utilización de suturas 5-0, 6-0, 7-0 y suturas como en las cirugías abiertas.16,17
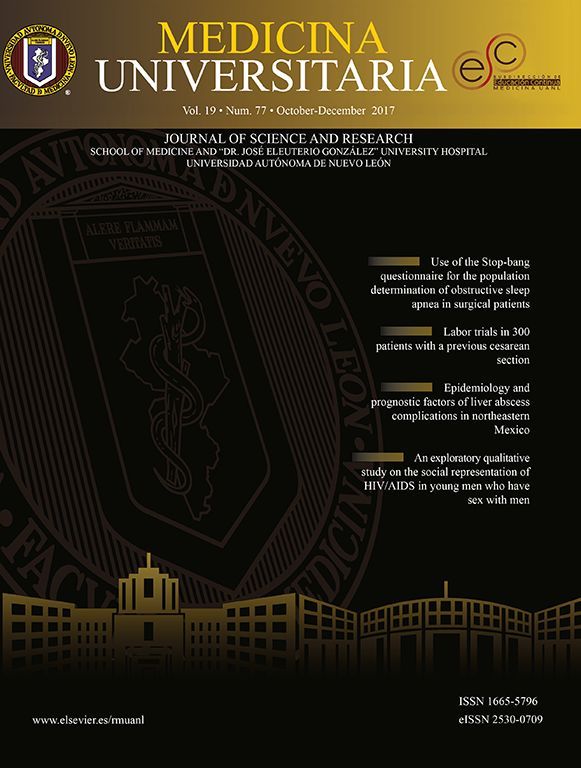
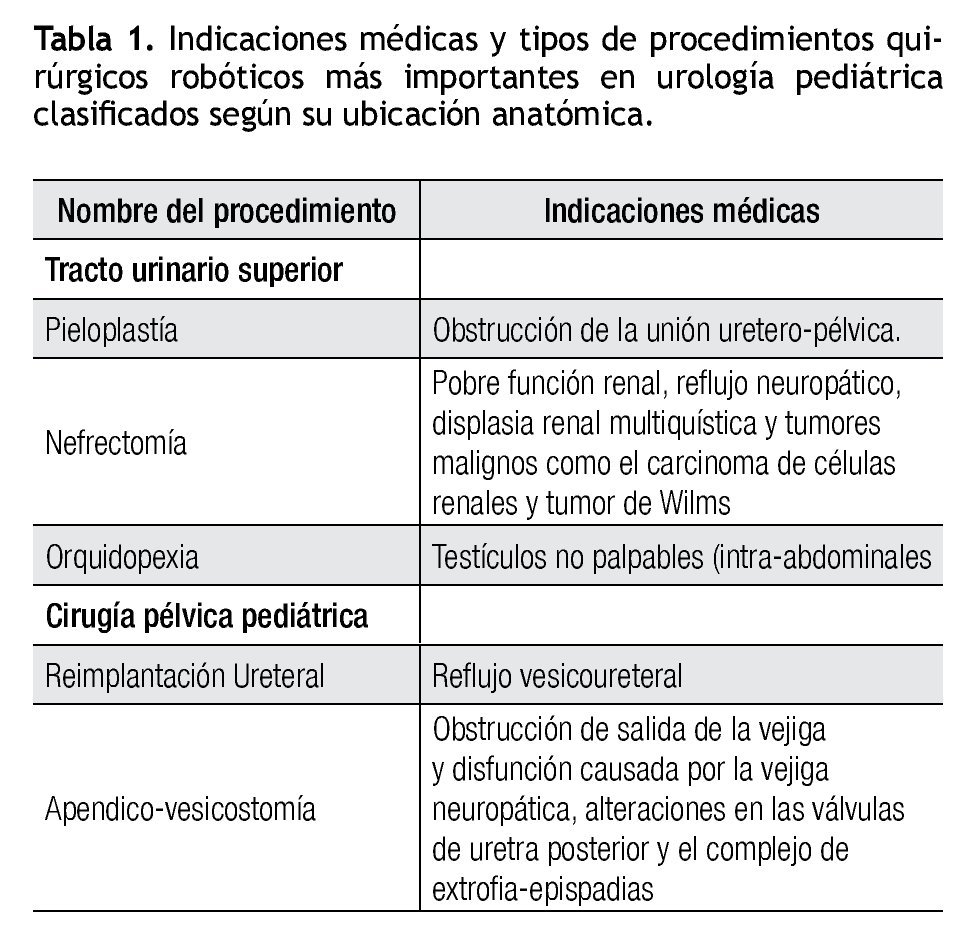
Procedimientos quirúrgicos más frecuentes en urología pediátrica clasificados según la localización (Tabla 1)
Tracto urinario superior.
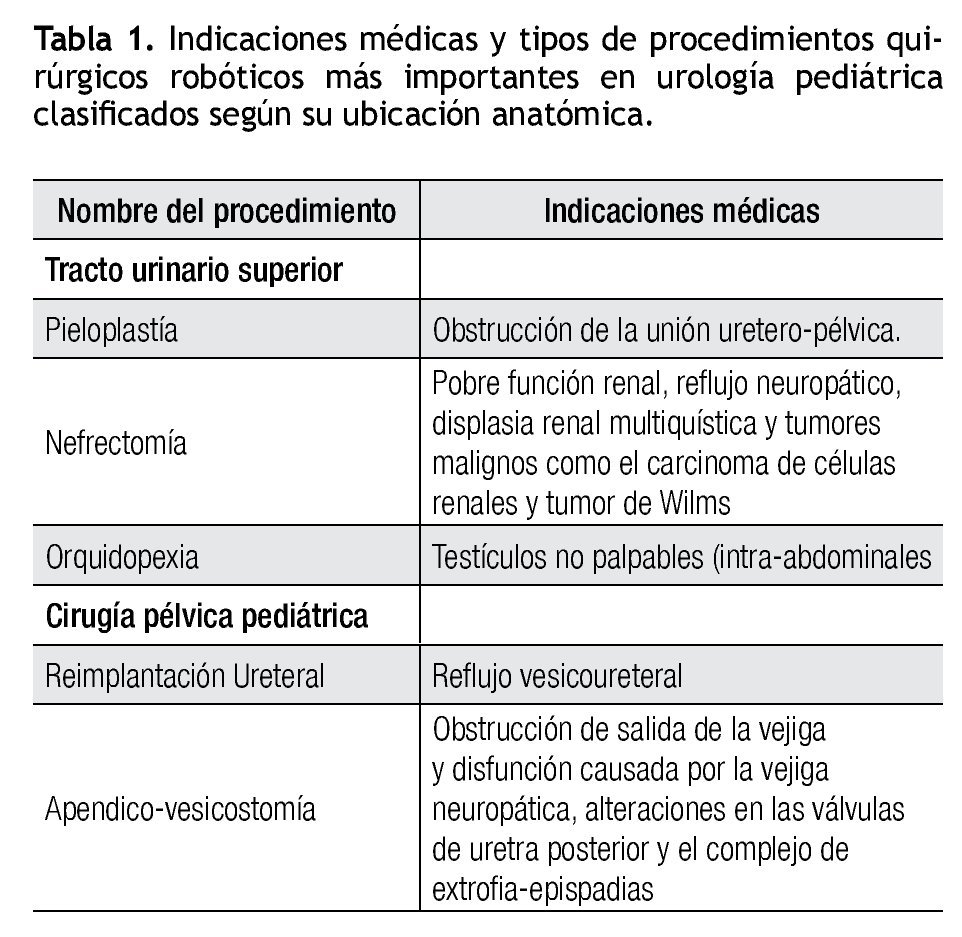
Pieloplastia: Los pacientes sometidos a este procedimiento quirúrgico se caracterizan por un deterioro funcional significativo del transporte de orina causada por una obstrucción intrínseca o extrínseca en el área donde el uréter se une a la pelvis renal. Los principales objetivos del tratamiento son aliviar los síntomas y la preservación de la función renal.18
La pieloplastia robótica asistida laparoscópicamente puede ser llevada a cabo por abordaje transperitoneal o retroperitoneal. El acceso transperitoneal es usado con más frecuencia ya que ha sido descrito con mejores resultados dado por la presencia de más espacio de trabajo y la ausencia de vasos sanguíneos cruzados en el polo inferior. Esta técnica requiere que el paciente este en posición supina y con la colocación de una sonda Foley. Se coloca una cuña de 30 grados en el lado de la unión uretero-pélvica y se asegura al paciente a la mesa.19
El paciente es preparado a partir de la apófisis xifoides a la sínfisis púbica. Se colocan tres puertos: un puerto umbilical para el acceso de la cámara, un puerto para línea media de trabajo entre el ombligo y el apéndice xifoides y el segundo puerto de trabajo en la línea media clavicular por debajo del ombligo. Preferiblemente se debe usar la técnica abierta para la colocación del primer puerto, y la técnica de punción para los puertos de trabajo. Posteriormente, se aseguran todos los puertos con suturas fasciales que son en última instancia, para cerrar la fascia. Un cuarto puerto se puede usar para ayudar en la retracción, el intercambio de agujas, entre otros, pero no se ha encontrado que sea necesario. Además, para los sistemas de robot Da vinci se cuenta con un cuarto brazo robótico, un tercer puerto de trabajo pueden ser usado para este propósito.
Después de la colocación del puerto, el paciente se inclina 60 grados y el robot se acopla encima del hombro ipsilateral del paciente. La exposición de la unión uretero-pélvica se lleva a cabo a través de un enfoque transmesentérico a la izquierda, o con la movilización del colon en ambos lados. La disección del uréter y pelvis renal se realiza a continuación de la misma manera como sería en la cirugía abierta. Los mismos principios de la manipulación de tejidos suaves se cumplen estrictamente. Para ayudar en la visualización y la reconstrucción de la unión uretero-pélvica, un "punto de tracción" se coloca a través de la pelvis renal para elevarlo. Este punto se puede avanzar a través de la pared abdominal o puede ser fijada a la pared abdominal interna.18
Inmediatamente se realiza una incisión en la pelvis y el uréter es espatulado lateralmente para preservar la propia orientación. La anastomosis uretero-piélica se realiza con sutura 5-0, 6-0, 7-0 o material de sutura absorbible. La sutura interrumpida o continua puede ser utilizada. Después de que la cara posterior de la anastomosis se completa, se debe considerar el drenaje de la reparación. Generalmente se drenan las pieloplastias robóticas utilizando catéteres ureterales doble J. El catéter se puede colocar de forma anterógrada después de la introducción del catéter dentro de la cavidad abdominal a través de un angiocatéter de gran calibre. El catéter doble J de tamaño adecuado se avanza por el uréter sobre un cable guía. La guía se retira y la parte proximal de la endoprótesis se coloca en la pelvis renal. Para confirmar su correcta colocación, la vejiga se llene con azul de metileno diluido y el reflujo del medio de contraste debe ser visto a nivel del extremo proximal de la endoprótesis. Por otra parte, el catéter se puede colocar inmediatamente antes de la cirugía robótica a través de un enfoque cistoscópico retrógrado. En casi todos los casos se utiliza la técnica de colocación anterógrada. Después de la colocación del catéter, el resto de la anastomosis se completa. No se utilizan habitualmente drenajes de Penrose.
Después de la cirugía, el catéter de Foley se retira en 24 horas y la mayoría de los pacientes están listos para ser enviados a casa a la fase de post-operatorio. Si un catéter ureteral doble J se deja en su lugar, se retira en aproximadamente cuatro semanas. Los resultados de este enfoque son excelentes y comparables a los de la cirugía abierta
Nefrectomía: Los pacientes sometidos a esta cirugía tienen una función renal muy pobre o nula relacionada a una obstrucción de la unión útero-pélvica, a consecuencia de cálculos renales, reflujo neuropático, displasia renal multiquística y tumores malignos como el carcinoma de células renales y el tumor de Wilms. Adicionalmente, tiene utilidad como herramienta de diagnóstico y tratamiento del paciente con uréter ectópico con sistema sencillo en niñas que debuta con patrón de incontinencia urinaria.
La nefrectomía se puede realizar utilizando enfoques tanto transperitoneal o retroperitoneal, pero la operación transperitoneal es más fácilmente realizable debido al tamaño de los puertos y los brazos, especialmente en la población infantil. En el abordaje transabdominal, el paciente se coloca en una posición de flanco modificada con una elevación de 60 grados. Los puertos están colocados en el ombligo para el puerto de la cámara, la línea media por encima de la línea clavicular media del ombligo y por debajo del ombligo, para los puertos de trabajo. En los bebés, el puerto de trabajo superior se debe colocar subxifoideo en la línea media y el puerto más bajo de trabajo lateral al músculo recto. El robot se acopla encima del hombro ipsilateral. El procedimiento se realiza según lo descrito para el abordaje laparoscópico. La elección de la vía transperitoneal o retroperitoneal depende de la experiencia del cirujano. Puede estar influenciada por la necesidad de procedimientos adicionales, tales como la nefroureterectomía total y el acceso vesical si es necesario el reimplante ureteral. El acceso retroperitoneal es distinto en la colocación del puerto y el posicionamiento del paciente. Los puertos se colocan por detrás o lateralmente, según las preferencias del cirujano. El tamaño de los brazos robóticos hace un abordaje posterior más difícil, excepto en los niños mayores (es decir, más de 12 años).19
Orquidopexia: La ausencia de testículos en el saco escrotal representa 20% de los testículos no descendidos, pueden incluir agenesia testicular, testículos de fuga y testículo intra-canalicular. Aunque el procedimiento laparoscópico se realizó originalmente para fines de diagnóstico, se ha hecho más factible en los pacientes pediátricos con testículos no palpables. Esta opción nos permite no sólo el diagnóstico, sino también una terapia adecuada, la cual se ha convertido en el manejo estándar para el problema de testículo no palpable. Una vez que los testículos se ha identificado intra-abdominal, la orquidopexia laparoscópica o de Fowler-Stephens se indica generalmente para los testículos intra-abdominales .6
Las ventajas de la orquidopexia laparoscópica en el testículo intra-abdominal es la posibilidad de iniciar el tratamiento tan pronto como se haga el diagnóstico y permitir la implementación de técnicas de cirugía mínimamente invasiva. La cirugía robótica se puede utilizar en casos difíciles, tales como testículos intra-abdominal de ubicación alta, y en particular para la segunda escena quirúrgica. El paciente se coloca en decúbito supino en posición de Trendelenburg con el lado ipsilateral elevado. En forma rutinaria se vacía la vejiga para ayudar en el acceso y la visualización. La colocación de los puertos imita la laparoscopia convencional, con el puerto de la cámara en el ombligo, y dos puertos de trabajo, uno en el mismo lado del testículo, por encima del ombligo en la línea clavicular media, y el otro contralateral por debajo del ombligo, también en la línea medio clavicular.19
Cirugía pélvica pediátrica
Reimplantación ureteral: El reflujo vesicoureteral (RVU) es una anomalía común que afecta a la unión vesico-ureteral y el reimplante ureteral es el procedimiento quirúrgico establecido (Figura 3).6

Figura 3. Reimplantación ureteral extravesical asistida por el sistema quirúrgico robótico da Vinci.
Entre las indicaciones para el reimplante ureteral, se incluyen las infecciones intercurrentes y el aumento del grado del reflujo. La inyección subureteral de materiales de implante son promisorios, con tasas de éxito cercanas a la de cirugía abierta después de dos o más inyecciones. La reimplantación laparoscópica exitosa ha sido descrita. La alternativa robótica también puede ser implementada en las diferentes técnicas del reimplante ureteral, es decir, extravesical e intravesical.19,20
Abordaje intravesical
El paciente se coloca en posición supina con las piernas separadas. La vejiga se llena con solución salina a través de la uretra. Usando una técnica abierta o con visualización a través de un cistoscopio pediátrico flexible, el puerto de 12 mm de la cámara se coloca en la línea media en la cúpula de la vejiga. Una sutura absorbible 3-0 asegura la pared de la vejiga y la piel para el trocar. Los puertos de trabajo, ya sean de 8 mm o 5 mm, se sitúan a medio camino entre el ombligo y el pubis en la línea clavicular media. Los puertos se fijan a la pared abdominal usando una puntada que se utiliza también para cerrar la vejiga. La vejiga se llena con CO2 para drenar la solución salina y el dispositivo robótico se coloca en los pies del paciente. Similar a la técnica abierta, la disección ureteral se inicia después de la colocación de un segmento de 6 cm de un tubo de alimentación de 5 Fr asegurando el uréter con una sutura absorbible 4-0. La movilización de los uréteres se hace como en el procedimiento laparoscópico pneumovesical usando el gancho o la tijera de cauterización. Los túneles submucosos se crean mediante la disección con tijeras de la interrupción original al otro lado del trígono, y la incisión de la mucosa en la zona del hiato nuevo. La anastomosis de los uréteres se realiza después de llevarlos a través del túnel de la mucosa.
Suturas absorbibles 4-0 se utilizan para asegurar el uréter a la vejiga y los músculos del manguito de la mucosa se fijan con sutura absorbible 5-0. La mucosa durante el hiato original se cierra con una sutura 5-0 absorbible. Si el paciente había tenido inyecciones como terapia previa, esto debe ser eliminado. Los puertos de trabajo se retiran y los puntos de la vejiga deben ser ajustados. El cistoscopio flexible se utiliza para inspeccionar el interior de la vejiga. Los puertos de entrada también se cierran en el nivel de la fascia. La sonda vesical se mantiene durante la primera noche post-operatorio.6
Abordaje extra-vesical
El enfoque extra-vesical puede realizarse de manera unilateral o bilateral, siguiendo los mismos pasos de la técnica abierta de Lich-Gregoir. La cistoscopia se puede realizar para colocar los catéteres ureterales abiertos para ayudar en la disección. Con el paciente en posición supina, la técnica abierta se utiliza para colocar el primer trocar y posteriormente el puerto de 12 mm de la cámara en el ombligo. Los puertos de trabajo de 8 mm o 5 mm, se colocan en la línea clavicular media bilateral, aproximadamente 1 cm por debajo de la línea umbilical. Si el niño tiene una longitud pubo-umbilical menor de 8 cm, entonces el puerto de la cámara en la línea media debe estar por encima del ombligo entre el xifoides y el ombligo para evitar la colisión del brazo robótico.6
El robot se acopla a los pies del paciente. La técnica sigue los mismos pasos que el procedimiento abierto de Lich-Gregoi. Se inicia mediante la disección del uréter después de abrir el peritoneo anterior al útero y la pared posterior de la vejiga. El plexo pélvico es fácilmente identificable medio y caudal del uréter. Hay que tener cuidado en cada caso para identificar el plexo pélvico, evitando lesiones en el área y permitir la movilización del uréter en el hiato. Aproximadamente se diseca 4 cm o 5 cm para permitir la movilidad y para evitar torceduras, como en el túnel de la vejiga creado para el uréter.
La incisión de la capa muscular de la vejiga se crea a través del detrusor a unos 3 cm, apoyado con el uso de las tijeras de cauterización. Cualquier perforación de la mucosa se cierra con una sutura absorbible 5-0 antes del cierre final del canal. La muscular de la vejiga se cierra sobre el uréter con una sutura absorbible 4-0 interrumpida. Se debe tener cuidado para evitar la obstrucción o torcimiento de la uretra. El cierre se lleva a cabo desde el segmento proximal a distal, o viceversa. En este último caso, el uréter se visualiza bien, pero la aguja tiene que ser pasada en el uréter cada vez que se coloca la sutura. Se debe coger la adventicia del uréter con cada sutura para asegurar que no se deslice hacia atrás durante el proceso de curación. La sonda vesical se retira a la mañana siguiente y el niño es dado de alta después de la micción.19
Apendicovesicostomía: La obstrucción de salida de la vejiga y disfunción causada por presencia de una vejiga neuropática, alteraciones en las válvulas de uretra posterior y el complejo de extrofia-epispadias, a menudo conllevan a la incontinencia urinaria y la disfunción renal en los niños. Aunque algunos de estos niños pueden ser tratados con medicamentos o con una intervención mínimamente invasiva, por lo general la apendicovesicostomía es el estándar de cuidado.9
El paciente se coloca en decúbito supino en posición de Trendelenburg. Se utilizan tres puertos. El puerto de 12 mm de la cámara se coloca en el ombligo y los otros dos puertos de 8 mm de trabajo en los lados derecho e izquierdo, en la línea media clavicular a nivel de las espinas ilíacas antero-superior. El procedimiento comienza con la movilización del ciego. Hay que tener cuidado para proteger el mesenterio apendicular y movilizarlo con una longitud adecuada. Una vez que el ciego se moviliza, el apéndice se separa desde el ciego, dejando un pequeño manguito de ciego con el apéndice. La vejiga se llena con solución salina y después de medir la mejor posición para el apéndice, debido a su longitud, la movilidad de la vejiga, y la ubicación del estoma. El apéndice se anastomosa a una pequeña abertura de la mucosa en el vértice de la vaguada del detrusor y el defecto se cierra con sutura absorbible 4-0 interrumpido. La base del apéndice se lleva hasta alcanzar el ombligo o la parte inferior del cuadrante derecho.21
Otros procedimientos: opciones terapéuticas que se han realizado en población pediátrica con técnicas asistida por robot incluye la corrección de un uréter retrocavo, pielo-ureterostomía; sin embargo, aún no se han publicado series con un mayor número de pacientes, con el fin de permitir la comparación con las técnicas de cirugía abierta o laparoscópica para estos procedimientos.
Conclusiones
La cirugía robótica en urología pediátrica continua día a día en proceso de evolución a pesar de los grandes avances y buenos resultados que se han logrado con las técnicas que se han podido establecer, con base en estudios clínicos y con el desarrollo de nuevos instrumentales que han facilitado este proceso. Las mejoras en los desenlaces clínicos que se han evidenciado con los diferentes procedimientos quirúrgicos relatados en población pediátrica, proveen grandes beneficios tanto para los pacientes y cirujanos; sin embargo, la necesidad de estudios más grandes con herramientas de trabajo mas sofisticadas siempre estará presente y serán parte del futuro inmediato de esta rama de la urología pediátrica.
Correspondencia: Hiep T. Nguyen.
Department of Urology, Children's Hospital Boston. 300 Longwood Ave. HU 353. Boston, Massachusetts 02115, USA.
Teléfono: 617 355 7796.
Correo electrónico:Hiep.Nguyen@childrens.harvard.edu.
Recibido: octubre 2011.
Aceptado: octubre 2011