


De las patologías de muñeca más frecuentes en la consulta del cirujano de la mano, las inestabilidades carpianas ocupan un lugar importante junto con el dolor en la vertiente ulnocarpiana cuya causa más frecuente son las lesiones del complejo fibrocartílago triangular, que en ocasiones van a condicionar una inestabilidad de la articulación radiocubital distal. Analizando los datos anatómicos y biomecánicos que diponemos de la muñeca y tomando como punto de partida los escasos protocolos rehabilitadores de las inestabilidades escafolunares y lunopiramidales que existen en la bibliografía, se exponen los programas rehabilitadores específicos para cada una de ellas. Se describen también los protocolos existentes para la rehabilitación tras las reparaciones del complejo fibrocartílago triangular y exponemos los protocolos con los que trabajamos en la actualidad.
Definimos también la importancia de la reeducación propioceptiva en este tipo de lesiones y describimos un programa detallado de introducción progresiva de determinados ejercicios encaminados a ello.
One of the most frequent wrist pathologies seen by the hand surgeon are the carpal instabilities together with the pain in the ulnocarpal side. The most common causes are due to injuries in the fibrocartilage triangular complex. These injuries sometimes may cause an instability of the distal radio-ulnar joint. After an analysis of the anatomical and biomechanical data, and taking the few rehabilitation protocols of scapholunate and lunotriquetral instabilities published in the literature, specific rehabilitation programs for each one of these are presented. A description of the protocols is provided for rehabilitation after fibrocartilage triangular complex repairs, as well as of the protocols currently used by us.
The importance of the propioceptive re-education in this type of injuries is also defined, and a detailed description of program of gradual introduction to certain exercises aimed at this.
Las inestabilidades escafolunares constituyen el 90% de las inestabilidades carpianas, seguidas de las lunopiramidales y en menor porcentaje de las mediocarpianas. Otro tipo de inestabilidades son las de la articulación radiocubital distal (ARCD) ocasionadas por lesiones del complejo fibrocartílago triangular (CFCT). Aunque no todas las lesiones del CFCT van a ocasionar una inestabilidad ARCD, y por ello se debe distinguir en los protocolos si esta existe o no.
Tras el tratamiento quirúrgico de las inestabilidades de muñeca no potenciaremos de una manera genérica todos los grupos musculares antebraquiales por igual, ya que cada tipo de inestabilidad va a requerir la potenciación selectiva de determinados grupos musculares.
El objetivo final será conseguir una articulación no dolorosa, estable y finalmente capaz de soportar los requerimientos de su actividad laboral, social y/o deportiva1. Todo ello logrando un equilibrio entre la movilidad, la estabilidad, y la correcta transmisión de fuerzas hacia las articulaciones de la muñeca y de la mano.
El proceso rehabilitador en este tipo de patologías comienza en el momento en que finaliza la reparación quirúrgica, durante el proceso de inmovilización determinado por el cirujano, con la supervisión de la correcta movilización de las articulaciones vecinas y con la vigilancia y el control del dolor y del edema. Esto último será esencial para poder llevar a cabo un buen programa rehabilitador, ya que los principales enemigos de una correcta ejecución del mismo serán la persistencia de dolor y de edema en el miembro.
Es básico conocer cuáles son los 4 elementos que sustentan una buena estabilidad de la muñeca: la buena congruencia articular, la integridad de todo el sistema ligamentario extrínseco e intrínseco —que constituyen la estabilidad estática—, el mantenimiento de un buen tono muscular antebraquial, y por último disponer de un buen control neuromuscular y propioceptivo2; estos 2 últimos constituyen la estabilidad dinámica y es ahí donde la rehabilitación juega un papel esencial.
El presente trabajo es una actualización de los fundamentos teóricos para la rehabilitación y una presentación de los protocolos que se pueden aplicar en las inestabilidades escafolunares, lunopiramidales y tras la lesión del CFTC (con o sin inestabilidad de la ARCD3), que se realiza en nuestro centro, basados en estos fundamentos.
Aplicación de la propiocepción en la rehabilitación de la muñecaConcepto de propiocepción y estudios sobre propiocepción de muñecaLa propiocepción es un sentido somático descrito por Charles Scout Sherrington en 1906, para definir las sensaciones provenientes de las áreas profundas del cuerpo, que contribuyen al equilibrio postural y a la estabilidad articular.
La existencia de mecanorreceptores en los ligamentos palmares de la muñeca fue inicialmente documentada por Petrie et al. en 19974.
Elisabet Hagert, una de las pioneras en el estudio de la propiocepción de la muñeca, ya hablaba de que «este es un nuevo campo en la terapia de la mano»5. Desde el Instituto Kaplan de Barcelona, Marc García Elías ha contribuido al conocimiento y desarrollo de estos contenidos.
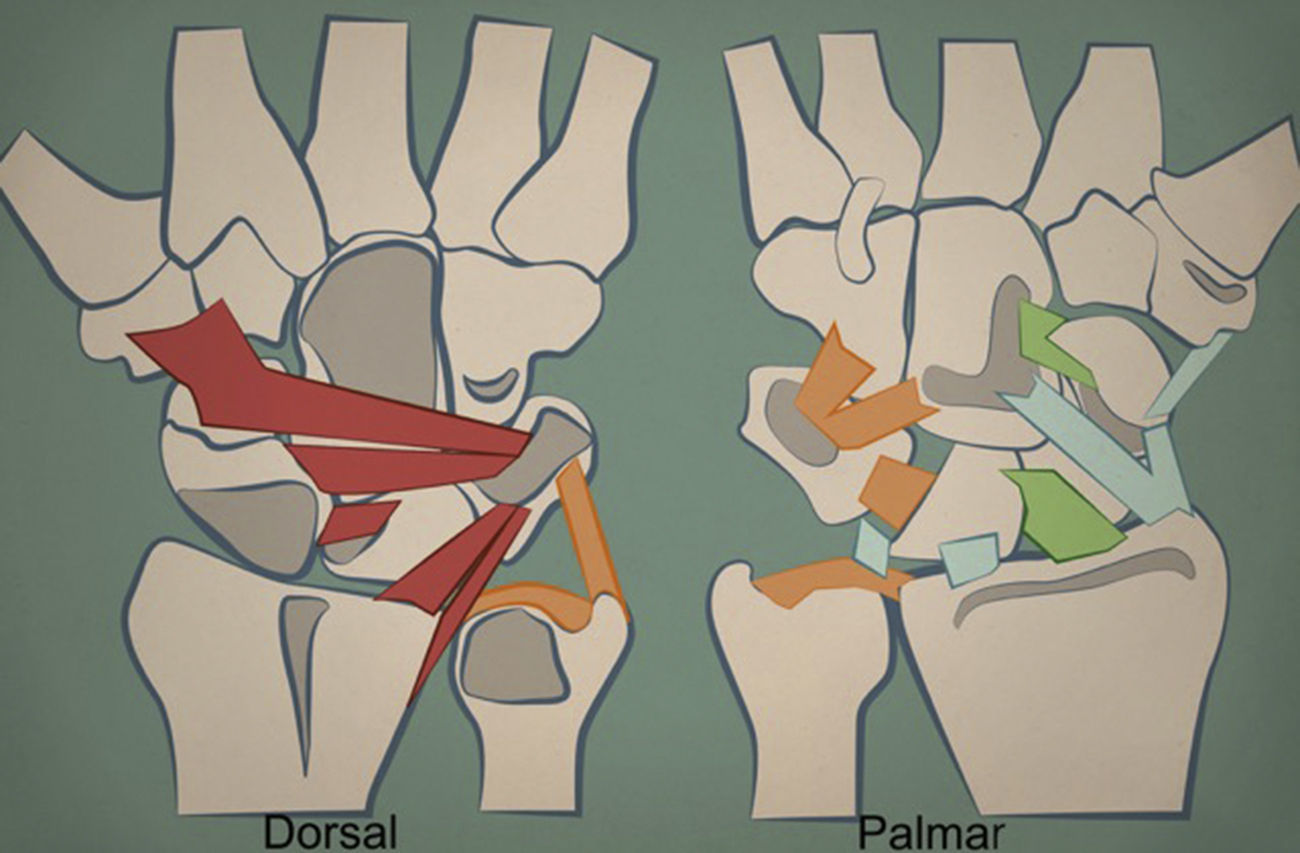
Con sus estudios, Hagert5 observó que los ligamentos de la muñeca presentan una composición e inervación distinta, indicando una diferencia en las funciones sensoriales y biomecánicas. Al examinar la distribución global de la inervación de la muñeca, se observa que los ligamentos dorsales y los relacionados con el hueso piramidal están ampliamente inervados, sin embargo, los palmares y radiales presentan un patrón de inervación más variable. El ligamento escafolunar es una excepción y presenta una inervación bastante pronunciada, sobre todo en su cara más palmar. El CFCT también se encuentra ampliamente inervado (fig. 1).
 también cuenta con un número elevado de mecanorreceptores.")
Mecanorreceptores de la muñeca. La figura de la izquierda corresponde a la vertiente dorsal de la muñeca. Cuanto más oscuro es el color del ligamento, mayor presencia de mecanorreceptores. Los ligamentos dorsales y los relacionados con el hueso piramidal están ampliamente inervados. El ligamento escafolunar en su vertiente palmar también. El CFCT (color naranja) también cuenta con un número elevado de mecanorreceptores.
Tras estos estudios, en el 2009, describieron la existencia de reflejos propioceptivos en un estudio experimental en humanos donde realizaban electromiografías tras estimular eléctricamente el ligamento escafolunar6. Inicialmente ello provocaba una estimulación de los músculos antagonistas con corta latencia, es decir, como mecanismo de protección inicial de la articulación, y posteriormente, una coactivación de los músculos agonistas y antagonistas con un mayor control de la estabilidad a más largo término. Con este estudio se puede decir que los reflejos musculares que se objetivan indican que el ligamento escafolunar tiene funciones sensitivas y propioceptivas, con un papel importante de protección articular, interviniendo en el control muscular y en la estabilidad de la muñeca.
Protocolo de rehabilitación propioceptiva para la muñecaEn el año 2010, Elisabet Hagert propone un protocolo de rehabilitación propioceptiva para la muñeca con base en los estudios existentes hasta el momento6. Se propone como una guía a seguir y posteriormente valorar los resultados por los especialistas en el tema.
Los tratamientos de rehabilitación y las técnicas fisioterápicas específicas en los aspectos sensitivo-motores se pueden llevar a cabo mediante ejercicios concretos y así poder compensar la pérdida de sensaciones ocasionada tras una lesión articular y el periodo de inmovilización, que a su vez ocasiona un borrado del esquema motor.
El diseño y la elección de los ejercicios dependerán de la etapa posquirúrgica en que se encuentre el paciente y de su evolución, y variará por supuesto en función del conocimiento de determinadas técnicas por parte del terapeuta y de la disposición de materiales.
Basándonos en la guía propuesta por Hagert, desde el año 2011 seguimos un programa de entrenamiento propioceptivo que detallamos a continuación:
- 1.
En primer lugar trabajamos el control propioceptivo de las posiciones de la muñeca: con la «terapia en espejo» (fig. 2) en la que el estímulo propioceptivo es la vista, se intenta lograr la mayor habilidad posible para reproducir una serie de movimientos predeterminados, es decir, aquellos movimientos que estamos viendo en el espejo con la mano sana. Complementaremos con «ejercicios tenodésicos» en mesa acompañados por la mano del fisioterapeuta7, el estímulo propioceptivo es el tacto con ligera presión sobre la cara dorsal de la mano (fig. 3). Con la «facilitación neuromuscular propioceptiva» (FNP) o diagonales de miembros superiores propuestas por Kabat se pretende estimular los músculos débiles, facilitar la conducción nerviosa, reactivar las vías reflejas y la memoria cinestésica utilizando patrones antagonistas en las diagonales.
- 2.
En la segunda fase trabajaremos el control neuromuscular consciente: el fortalecimiento de determinados grupos musculares para mejorar la estabilidad de la muñeca. Se puede trabajar en isométrico, isotónico, concéntrico y excéntrico.
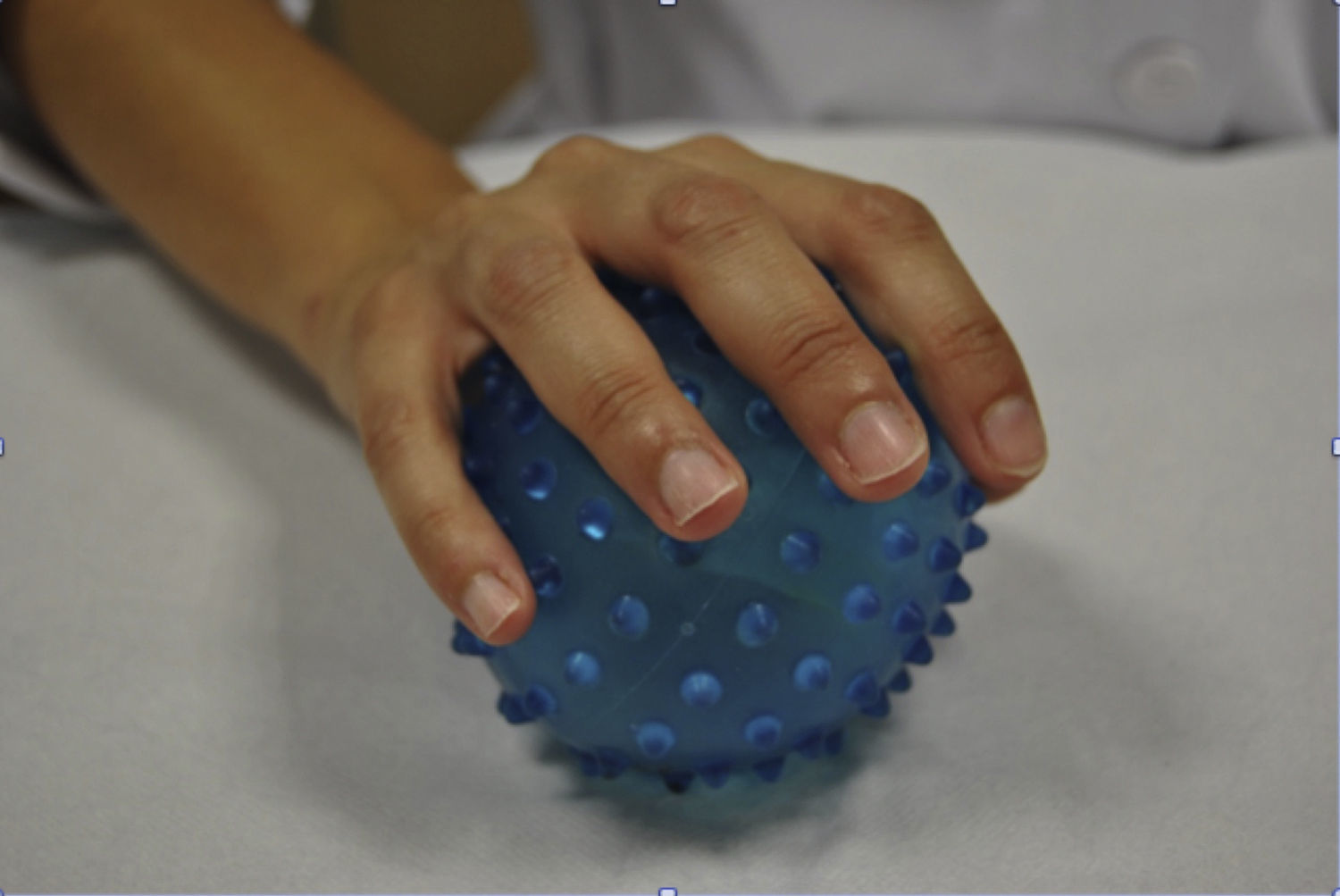
Ejercicios con pelota: los estímulos propioceptivos serán la presión ejercida sobre la misma y la resistencia que ejerce la pelota sobre la cara palmar de la mano, la presión que ejerce la mano sana sobre el dorso de la afecta, así como la estabilización del codo (fig. 4).
 Figura 4.
Figura 4.Propiocepción con pelota. Los estímulos propioceptivos serán la presión ejercida sobre la misma y la resistencia que ejerce la pelota sobre la cara palmar de la mano, así como la estabilización del codo. Si colocamos la mano sana sobre el dorso de la afecta, aumenta el control propioceptivo.
(0,1MB).Ejercicios sobre BOSU® (Balance Trainer-Rehab Medic): se añade la complejidad de una superficie inestable que favorecerá el equilibrio postural y la estabilidad articular.
Biometrics E- Link® (G-100-Technologyes SL): sistema informático con amplio programa de juegos en los que el estímulo visual va a condicionar la velocidad, la precisión y la calidad del movimiento de la muñeca.
Los ejercicios activos-resistidos con bandas elásticas que forman parte del programa de fortalecimiento muscular específico para cada tipo de inestabilidad constituyen también un estímulo propioceptivo, pues la banda elástica funciona como estímulo para aumentar la demanda de contracción de los grupos musculares trabajados.
- 3.
Y finalmente, el control neuromuscular inconsciente: ya en las fases finales de recuperación y en ausencia de dolor. Con el Powerball® (RPM Sports Ltd), tal como describieron Balan y García-Elías8 en 2008, trabajamos no solo el fortalecimiento sino también la eficiencia neuromuscular, ya que las fuerzas multidireccionales que genera el giroscopio provocan contracciones musculares reactivas a ello (fig. 5). La realización de ejercicios pliométricos con pelota (movimientos rápidos de extensión-retracción) del tipo lanzamientos contribuye también a mejorar la capacidad anticipatoria de los distintos grupos musculares de la muñeca.




Los objetivos de la rehabilitación van a ser los mismos independientemente de la técnica quirúrgica empleada, ya sea una reparación del ligamento escafolunar o plastia de reconstrucción. Sí que variarán los tiempos de inmovilización y los tiempos de introducción de determinados ejercicios.
ObjetivosLograr un recorrido articular aceptable y funcionalUn recorrido articular completo no es necesario para lograr una función satisfactoria9. Una muñeca estable con escaso o nulo dolor es más funcional que una muñeca con recorrido articular completo pero dolorosa. La mayoría de autores están de acuerdo en que no se necesita un recorrido articular completo para lograr la mayoría de actividades de la vida diaria. Según Roche y Reynaud10, con una flexión dorsal de entre 0° y 30° se logra un coeficiente de utilidad de 0,9 (un 90% de las actividades de la vida diaria) y con una flexión palmar de entre 0° y 30° se puede lograr el 70% de las mismas.
Para conseguirlo trabajaremos prioritariamente en activo o autoasistido, evitando el trabajo articular pasivo al menos en la etapas iniciales.
Podremos introducir precozmente el trabajo activo combinado de extensión con cierto grado de desviación radial y la desviación cubital con una mínima flexión o dart thrower's motion (movimiento de lanzador de dardos). Tal como describieron Palmer et al.11 en 1985, este movimiento está implícito en la mayoría de movimientos de la muñeca realizados en las actividades de la vida diaria. Se ha comprobado que es la articulación mediocarpiana la que está implicada esencialmente en él, por lo que no pone en peligro la reparación de los ligamentos de la primera hilera del carpo12.
Recuperación de la fuerza de presión palmarTal como demuestran en sus estudios Salvà Coll et al.13, cuando ejercemos una carga axial sobre una muñeca, se va a producir una flexión del escafoides, una extensión del semilunar y una pronación de la hilera distal del carpo. Si esta misma carga la ejercemos sobre un carpo con inestabilidad escafolunar, la situación varía: el escafoides se flexiona pero también pronará pues al desvincularse del hueso semilunar, pasará a actuar como la hilera distal. Como el hueso semilunar realiza una extensión, el hueso grande tiene espacio para poder descender. Por este motivo, si reparamos el ligamento y queremos preservarlo, demoraremos el trabajo de prensa y todas las actividades que impliquen carga axial tales como coger peso o el apoyo palmar hasta que consideremos que la reparación es segura.
Potenciación selectiva de determinados grupos musculares que facilitan la coaptación del espacio escafosemilunarLa idea de que los músculos participan en la estabilización dinámica del carpo no es nueva: en 1980, Kauer14, ya hablaba del papel que tenía el abductor pollicis longus (APL) y el extensor carpi ulnaris (ECU) en la estabilidad del carpo. En el 2002, Linscheid y Dobyns15 hablaban del papel estabilizador del flexor carpi radialis (FCR) en muñecas con inestabilidades de tipo dinámico. Pues bien, en los últimos 20 años, diversos estudios sobre cadáveres han demostrado que hay un grupo de músculos que con su contracción aislada provocan supinación de la hilera distal del carpo, favoreciendo la coaptación del espacio escafolunar. Estos músculos son el extensor carpi radialis longus (ECRL), el APL y el flexor carpi ulnaris (FCU). El FCR, a pesar de ser un músculo pronador de la hilera distal, también favorece la unión escafolunar ya que contrarresta con su contracción aislada la flexión y pronación del escafoides, supinándolo16. Sin embargo, hay un músculo que es considerado el enemigo en este tipo de inestabilidad y es el ECU. Este es considerado como un músculo pronador de la hilera distal del carpo y su contracción en las disociaciones escafolunares va a provocar un incremento del espacio con un incremento de la flexión y rotación de la primera hilera del carpo y del escafoides.
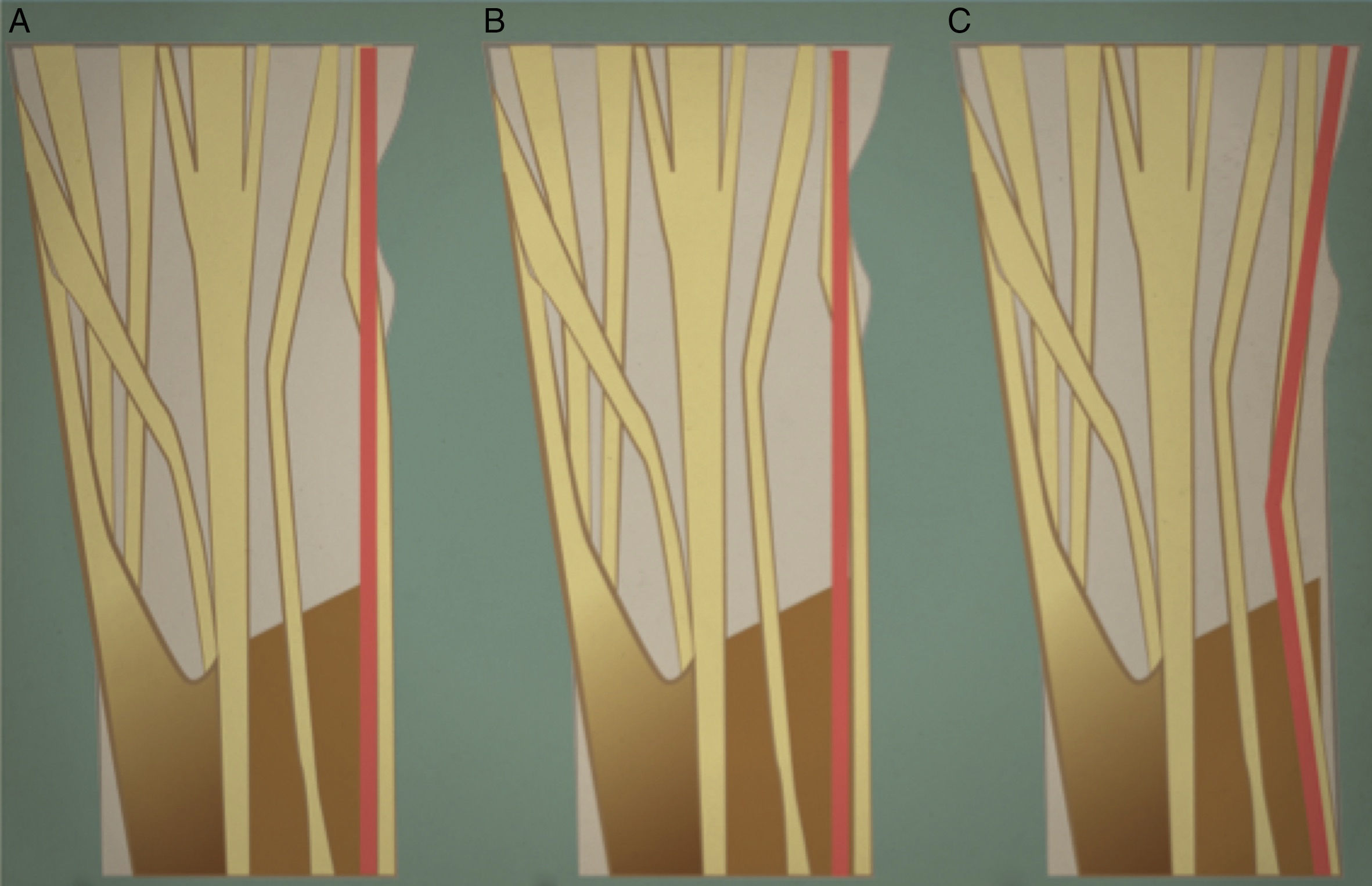
A esto debemos añadir los datos de estudios recientes en cadáver realizados por Esplugas et al.17. Partiendo de la base de que el tendón del ECU presenta una oblicuidad de unos 30° en la posición de máxima supinación del antebrazo (fig. 6), ha quedado demostrado que cuanto mayor es la angulación, mayor es su efecto pronador. Además, si nosotros activamos simultáneamente todos los músculos antebraquiales, los músculos supinadores (ECRL, APL y FCU) son capaces de contrarrestar el efecto del ECU si el antebrazo se encuentra en posición neutra, pero no en posición de máxima pronación. Por tanto no trabajaremos ni con el brazo en pronación, ya que no conseguiremos contrarrestar el efecto del ECU, ni en supinación porque el ECU así incrementará su mecanismo pronador. Por tanto, trabajaremos con el antebrazo en posición neutra.
 a nivel de la muñeca en color rojo. A y B) Representan el antebrazo en posición neutra y en pronación máxima. C) Representa la oblicuidad del tendón cuando el antebrazo se encuentra en máxima supinación. Ha quedado demostrado que cuanto mayor es la angulación, mayor es su efecto pronador.")
El tendón del extensor carpi ulnaris (ECU) a nivel de la muñeca en color rojo. A y B) Representan el antebrazo en posición neutra y en pronación máxima. C) Representa la oblicuidad del tendón cuando el antebrazo se encuentra en máxima supinación. Ha quedado demostrado que cuanto mayor es la angulación, mayor es su efecto pronador.
Por 2 motivos: la propia lesión daña los mecanorreceptores (sobre todo en la zona de inserción del ligamento al hueso y en el tejido conectivo adyacente al ligamento), y toda inmovilización va a condicionar un borrado del esquema motor. La lesión ligamentaria escafolunar, además de la inestabilidad mecánica intracarpiana que provoca, va a condicionar un déficit propioceptivo que va a provocar una disminución del control neuromuscular, entendido este como una respuesta anticipatoria de determinados músculos para mantener la congruencia escafolunar. Por ello, el trabajo propioceptivo en muñeca va a ser esencial para evitar la perpetuación del cuadro de inestabilidad.
En este punto es importante destacar las ventajas de la cirugía artroscópica con respecto a las técnicas abiertas, en las que hay una lesión casi constante del nervio interóseo posterior así como de los estabilizadores secundarios de la muñeca al realizar el abordaje dorsal. Las ventajas de la artroscopia en este sentido serán: menor rigidez de la articulación, lo que facilita la recuperación de recorridos articulares y la ausencia de lesión del nervio interóseo posterior así como de los estabilizadores secundarios, lo que nos va a permitir la correcta reeducación propioceptiva18,19.
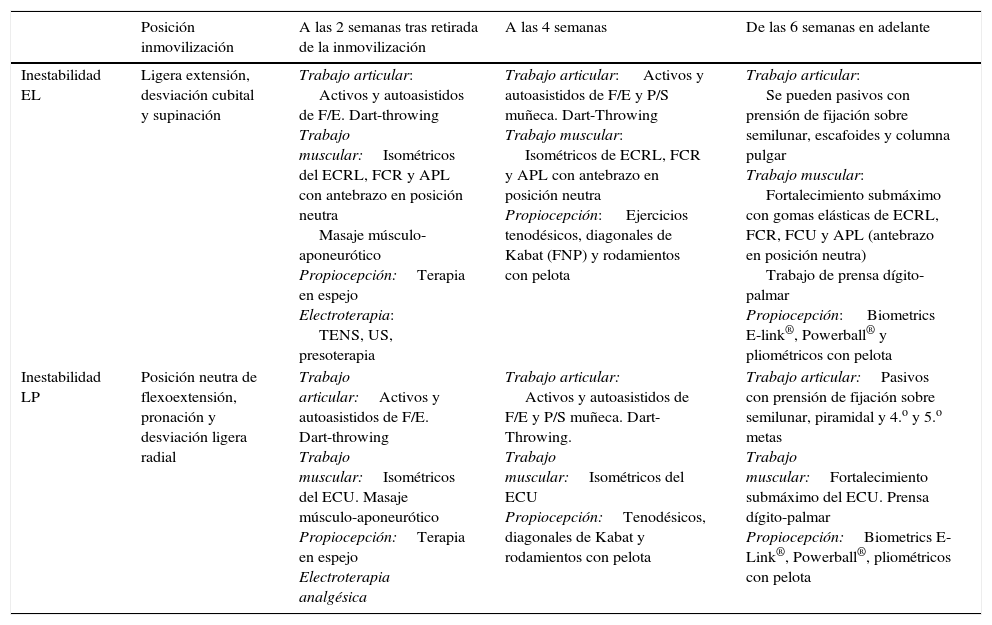
Protocolo rehabilitador tras la reparación escafolunarAnte la escasez de protocolos posquirúrgicos específicos para este tipo de reparaciones existentes en la literatura, tomamos como punto de partida el propuesto por Quesnot y Chanussot20 en el 2010 y por Chanussot y Danowsky21, elaborando y poniendo en marcha un protocolo propio que hemos ido modificando basándonos en los recientes estudios experimentales (tabla 1).
Protocolos rehabilitadores tras el tratamiento de las lesiones escafolunares y lunopiramidales
| Posición inmovilización | A las 2 semanas tras retirada de la inmovilización | A las 4 semanas | De las 6 semanas en adelante | |
|---|---|---|---|---|
| Inestabilidad EL | Ligera extensión, desviación cubital y supinación | Trabajo articular: Activos y autoasistidos de F/E. Dart-throwing Trabajo muscular:Isométricos del ECRL, FCR y APL con antebrazo en posición neutra Masaje músculo-aponeurótico Propiocepción:Terapia en espejo Electroterapia: TENS, US, presoterapia | Trabajo articular: Activos y autoasistidos de F/E y P/S muñeca. Dart-Throwing Trabajo muscular: Isométricos de ECRL, FCR y APL con antebrazo en posición neutra Propiocepción: Ejercicios tenodésicos, diagonales de Kabat (FNP) y rodamientos con pelota | Trabajo articular: Se pueden pasivos con prensión de fijación sobre semilunar, escafoides y columna pulgar Trabajo muscular: Fortalecimiento submáximo con gomas elásticas de ECRL, FCR, FCU y APL (antebrazo en posición neutra) Trabajo de prensa dígito-palmar Propiocepción: Biometrics E-link®, Powerball® y pliométricos con pelota |
| Inestabilidad LP | Posición neutra de flexoextensión, pronación y desviación ligera radial | Trabajo articular:Activos y autoasistidos de F/E. Dart-throwing Trabajo muscular:Isométricos del ECU. Masaje músculo-aponeurótico Propiocepción:Terapia en espejo Electroterapia analgésica | Trabajo articular: Activos y autoasistidos de F/E y P/S muñeca. Dart-Throwing. Trabajo muscular:Isométricos del ECU Propiocepción:Tenodésicos, diagonales de Kabat y rodamientos con pelota | Trabajo articular:Pasivos con prensión de fijación sobre semilunar, piramidal y 4.o y 5.o metas Trabajo muscular:Fortalecimiento submáximo del ECU. Prensa dígito-palmar Propiocepción:Biometrics E-Link®, Powerball®, pliométricos con pelota |
F/E, flexo-extensión; P/S, prono-supinación; ECRL, extensor carpi ulnaris; FCR, flexor carpi radialis; APL, abductor pollicis longus; FCU: flexor carpi ulnaris; ECU: extensor carpi ulnaris; TENS: transcutaneous electrical nerve stimulation; US: ultrasonidos.
El tiempo de inmovilización posquirúrgico variará según las indicaciones del cirujano en función del tipo de reparación empleada (reparación del ligamento o ligamentoplastia de reconstrucción18,19). Este podrá oscilar entre 2 y 6 semanas según la técnica. El antebrazo deberá inmovilizarse con férula con la muñeca en ligera extensión, desviación cubital y en supinación con la finalidad de contrarrestar el efecto negativo de una posible contracción repentina del ECU. Es importante no olvidar dejar libre las metacarpofalángicas para poder movilizar los dedos sin la presión del yeso sobre las mismas. Durante este periodo será muy importante el control del dolor y el edema; se pautarán antiinflamatorios, se insistirá en la elevación del miembro y en la movilización de los dedos, del hombro y raquis cervical. No podemos olvidar que la perpetuación del edema va a condicionar la aparición de adherencias, fibrosis y como consecuencia, rigidez articular.
Las 2 primeras semanas tras la retirada de la inmovilización se colocará una ortesis removible, que el paciente llevará durante 2 semanas más (esta puede prolongarse por la noche para evitar posiciones viciosas). Distinguiremos entre el trabajo articular, el muscular, la propiocepción y la electroterapia.
El trabajo articular consistirá en ejercicios activos y autoasistidos (ayudados con la mano sana) de flexión y extensión de muñeca evitando el trabajo pasivo. Se trabajará también activamente la articulación mediocarpiana con el movimiento del lanzador de dardos (dart-throwing) con el antebrazo en posición neutra, codo apoyado, extensión con desviación radial de muñeca, seguido de una mínima flexión con desviación cubital.
El trabajo muscular será en isométrico (contracción muscular sin que haya desplazamiento articular). Se trata de ir tonificando la musculatura favorecedora de la coaptación del intervalo escafolunar (ECRL, APL, FCR y FCU). Se realizará con el antebrazo en posición neutra y contra la resistencia de la pared o la mano del fisioterapeuta.
La reeducación propioceptiva la trabajaremos desde el inicio con la terapia en espejo.
Para el control del dolor, podremos aplicar el transcutaneus electrical nerve stimulation (TENS) o el ultrasonido (US) pulsado a frecuencias altas, y para el control del edema, la presoterapia de miembro superior.
A las 4 semanas, el movimiento articular se trabajará ya de manera completa en los 6 arcos de movimiento de la muñeca. El trabajo seguirá siendo activo y autoasistido evitando las movilizaciones pasivas dolorosas.
El trabajo muscular seguirá siendo en isométrico, ya que es mucho mejor tolerado y provoca menos sobrecarga en las etapas tempranas.
En el entrenamiento propioceptivo introduciremos los ejercicios tenodésicos acompañados por el fisioterapeuta y podremos iniciar rodamientos con pelota sobre la mesa con apoyo de la mano sana sobre la intervenida. Se pueden trabajar las cadenas de Kabat et al.22.
Es importante recordar al paciente que antes de las 6 semanas tras la retirada de la inmovilización tendrá prohibido realizar actividades que impliquen un aumento de la presión axial sobre el carpo, tales como apoyarse en la mano, coger peso o ejercitar presión sobre una pelota.
A partir de las 6 semanas en adelante se irán introduciendo progresivamente ejercicios de mayor complejidad.
Si nos ha quedado limitación articular, generalmente en flexión, podremos trabajarlo ya pasivamente con la ayuda del fisioterapeuta (con prensión de fijación siempre sobre semilunar, escafoides y columna del pulgar) o con la ayuda de la electroestimulación a nivel de los flexores y extensores en el antebrazo.
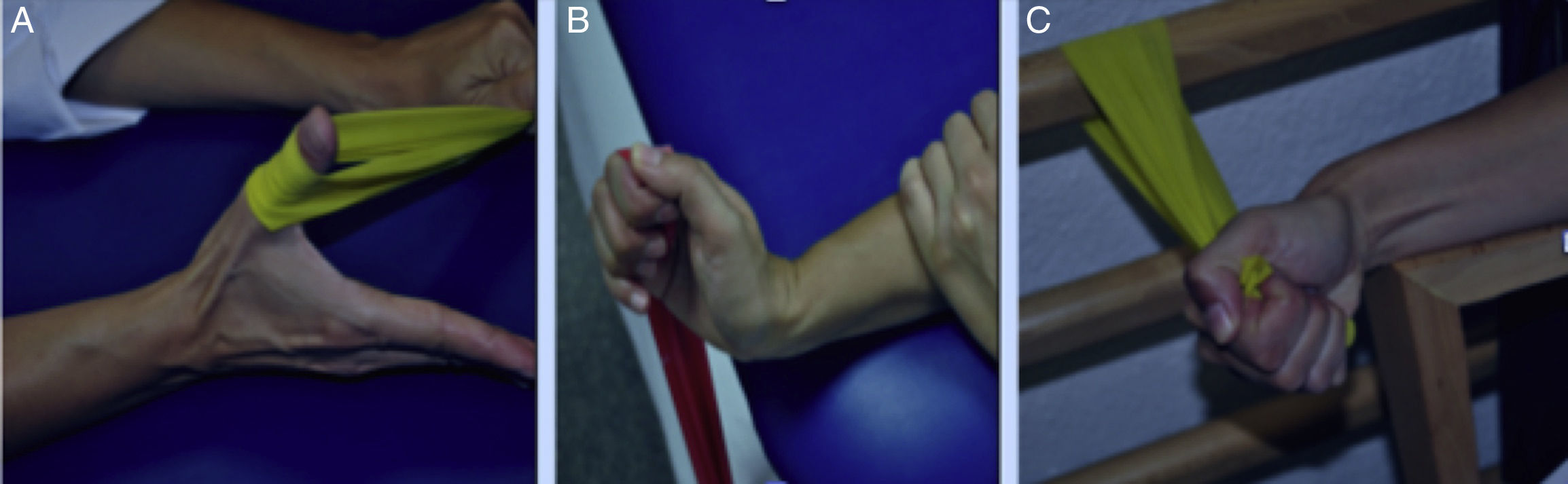
Iniciaremos el fortalecimiento muscular con gomas elásticas de mínima resistencia del ECRL, APL, FCR y FCU (fig. 7). Trabajaremos con el antebrazo en posición neutra para evitar la coactivación del ECU. Iniciaremos también el trabajo de prensa dígito-palmar inicialmente en isométrico y más adelante con ejercitador de prensa (muelles) o pelotita de espuma.
 Abductor pollicis longus (APL): colocamos la banda elástica a nivel de la base de la metacarpofalángica y realizamos un movimiento de abducción del pulgar contra la resistencia de la goma. B) Extensor carpi radialis (ECRL): extensión de la muñeca con ligera desviación radial. Antebrazo en posición neutra. C) Potenciación del flexor carpi radialis (FCR) mediante una flexión de la muñeca con ligera desviación radial y el antebrazo en posición neutra.")
Potenciación con banda elástica de músculos coaptadores intervalo escafolunar. A) Abductor pollicis longus (APL): colocamos la banda elástica a nivel de la base de la metacarpofalángica y realizamos un movimiento de abducción del pulgar contra la resistencia de la goma. B) Extensor carpi radialis (ECRL): extensión de la muñeca con ligera desviación radial. Antebrazo en posición neutra. C) Potenciación del flexor carpi radialis (FCR) mediante una flexión de la muñeca con ligera desviación radial y el antebrazo en posición neutra.
Progresivamente el trabajo propioceptivo será de mayor complejidad: comenzaremos a trabajar los distintos programas del Biometrics E-Link® y cuando lo realice el paciente con facilidad y en ausencia de dolor pasaremos al trabajo con el Powerball®. Los ejercicios pliométricos con pelota ayudarán al paciente a su preparación para la reincorporación laboral y/o deportiva.
Con ello se puede llegar a lograr la reincorporación laboral y/o deportiva en un periodo de tiempo comprendido entre los 4 y 6 meses.
Rehabilitación de las lesiones del ligamento lunopiramidalBases biomecánicas y objetivos de la rehabilitaciónLos objetivos serán los mismos que en la rehabilitación de la inestabilidad escafolunar: combatir el dolor y el edema, recuperación de los recorridos articulares, recuperación de la fuerza de prensa, fortalecimiento de determinados grupos musculares que contribuyen a la coaptación del intervalo lunopiramidal y entrenamiento propioceptivo (hay que recordar la gran cantidad de mecanorreceptores que hay a nivel de los ligamentos relacionados con el hueso piramidal) (fig. 1).
Los estudios en cadáver han demostrado que cuando existe una disrupción del ligamento lunopiramidal, al aplicar una presión axial en el carpo, el piramidal se flexiona y supina, comportándose como la hilera distal del carpo, y el semilunar, por el contrario, realiza un movimiento de pronación con el escafoides23. Ello genera un gap que para poder compensarlo, debemos conseguir que el semilunar supine y el piramidal prone y se extienda.
Pues bien, el músculo ECU es el único pronador de la hilera distal capaz de extender el piramidal y por tanto deberá ser potenciado como estabilizador secundario del intervalo lunopiramidal. Deberá tenerse la precaución de no trabajar los músculos supinadores (ECRL, APL y FCR) que puedan aumentarnos el gap lunopiramidal.
Protocolo rehabilitador tras el tratamiento quirúrgico de la inestabilidad lunopiramidalSeguiremos esencialmente el mismo protocolo que tras la reparación del ligamento escafolunar pero con una serie de diferencias significativas que se muestran en la tabla 1:
- •
El tiempo de inmovilización posquirúrgico será de 2 a 6 semanas, según la técnica y el criterio del cirujano.
- •
La correcta posición de la inmovilización deberá ser: en pronación, posición neutra sin flexión ni extensión y en ligera desviación radial17.
- •
A la hora de realizar las movilizaciones pasivas por el fisioterapeuta, a partir de la 6.a semana tras la retirada de la inmovilización, la prensión de fijación deberá ejercerse sobre el semilunar, piramidal y 4.o y 5.o radios20.
- •
Realizaremos fortalecimiento muscular esencialmente del ECU y evitaremos la potenciación de los ECRL, FCR y APL.
El CFCT es una estructura ligamentosa-cartilaginosa que tiene su origen en el borde medial del radio distal y se inserta en la base de la estiloides cubital. Está constituido por el fibrocartílago triangular (FCT), que se articula con el polo proximal del semilunar y piramidal, el menisco homólogo, muy vascularizado e inervado, que conecta la porción distal del FCT con la cortical dorsal del hueso piramidal, los ligamentos radioulnares palmares y dorsales, el ligamento ulnocarpal y el suelo de la vaina del tendón ECU.
Solo en el 15-20% de la superficie del FCT se encuentra vascularizado, siendo la vertiente más radial y central del FCT prácticamente avascular.
En cuanto a la inervación, depende esencialmente del nervio interóseo posterior y hay abundantes corpúsculos de Ruffini por todo el CFCT y de Pacini y Golgi en la periferia, tal como demostraron Cavalcante et al.24. La abundancia de mecanorreceptores una vez más nos va a hacer entender el porqué de la importancia de la reeducación propioceptiva tras las reparaciones del CFCT y por qué las técnicas artroscópicas que preservan al nervio interóseo posterior van a facilitar la recuperación funcional en lo que se refiere a propiocepción propiamente dicha.
Las funciones de CFCT son, por un lado, ser el principal estabilizador de la ACRD, estabilizar la articulación cubitocarpiana y ser transmisor de fuerzas entre el cúbito y el carpo.
En cuanto a aspectos relevantes biomecánicos a tener en cuenta a la hora de la rehabilitación podemos destacar:
- •
En determinados gestos de la mano, en especial el de la prensa palmar (pronación y puño), biomecánicamente se produce lo que se denomina «varianza cubital», es decir, la epífisis distal del cúbito realiza un movimiento de vaivén en sentido distal, y esto condiciona, en caso de reparación, que esta se someta a tensión. Por ello evitaremos la prensa dígito-palmar hasta cumplir la 6.a semana posreparación.
- •
Las estructuras estabilizadoras de la ARCD son el CFCT, los ligamentos ulnocarpianos, el músculo pronador cuadrado y el músculo ECU.
El pronador cuadrado (desde 1/3 distal de la superficie anterior del cúbito a cara anterior distal del radio) no solo actúa pasivamente como una pared evitando la subluxación palmar del cúbito cuando tenemos el brazo en supinación, sino que también colabora activamente en la coaptación de la ARCD.
El ECU (de epicóndilo humeral a base del 5.o metacarpiano), cuando tenemos el brazo en posición pronada, cruza oblicuamente el antebrazo coaptando la cabeza cubital contra la cavidad sigmoidea del radio, y en supinación se opone dinámicamente a que la cabeza cubital se desplace en sentido palmar.
Por tanto, en caso de que la lesión del CFCT vaya asociada a inestabilidad de la ARCD será conveniente la potenciación selectiva de estos 2 grupos musculares: pronador cuadrado y ECU.
Protocolos rehabilitadoresLas posibilidades terapéuticas en las lesiones del CFCT son las siguientes: desbridamiento sin reparación, reinserción periférica a la cápsula, reinserción de ligamentos radioulnares a la fóvea o a nivel radial y ligamentoplastia con injerto libre del tendón palmaris longus o del FCR25.
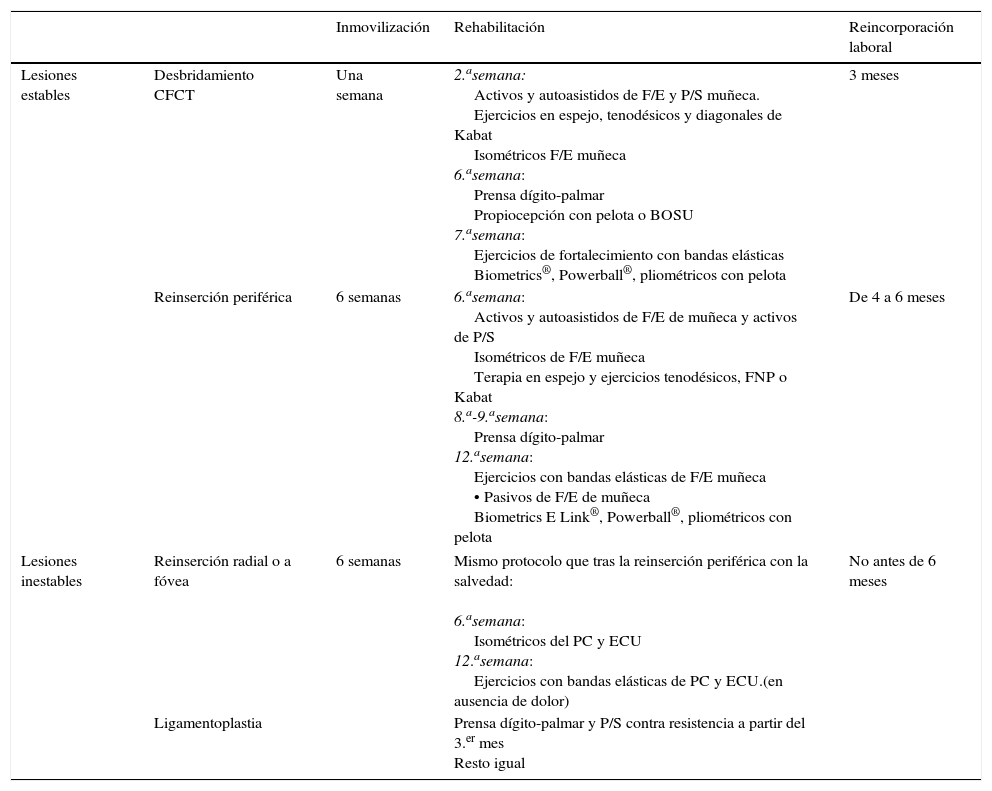
Tras revisar los distintos protocolos presentes en la bibliografía, proponemos distinguir entre lesiones del CFCT que condicionan inestabilidad de la ARCD (en las que las técnicas empleadas serán la reinserción de los ligamentos radioulnares a fóvea o a borde radial y las ligamentoplastias), y las que no condicionan inestabilidad de la ARCD (desbridamiento y reinserción periférica) (tabla 2).
Protocolos rehabilitadores de las lesiones del complejo fibrocartílago triangular (CFCT). Lesiones estables e inestables
| Inmovilización | Rehabilitación | Reincorporación laboral | ||
|---|---|---|---|---|
| Lesiones estables | Desbridamiento CFCT | Una semana | 2.asemana: Activos y autoasistidos de F/E y P/S muñeca. Ejercicios en espejo, tenodésicos y diagonales de Kabat Isométricos F/E muñeca 6.asemana: Prensa dígito-palmar Propiocepción con pelota o BOSU 7.asemana: Ejercicios de fortalecimiento con bandas elásticas Biometrics®, Powerball®, pliométricos con pelota | 3 meses |
| Reinserción periférica | 6 semanas | 6.asemana: Activos y autoasistidos de F/E de muñeca y activos de P/S Isométricos de F/E muñeca Terapia en espejo y ejercicios tenodésicos, FNP o Kabat 8.a-9.asemana: Prensa dígito-palmar 12.asemana: Ejercicios con bandas elásticas de F/E muñeca • Pasivos de F/E de muñeca Biometrics E Link®, Powerball®, pliométricos con pelota | De 4 a 6 meses | |
| Lesiones inestables | Reinserción radial o a fóvea | 6 semanas | Mismo protocolo que tras la reinserción periférica con la salvedad: 6.asemana: Isométricos del PC y ECU 12.asemana: Ejercicios con bandas elásticas de PC y ECU.(en ausencia de dolor) | No antes de 6 meses |
| Ligamentoplastia | Prensa dígito-palmar y P/S contra resistencia a partir del 3.er mes Resto igual | |||
En lesiones pequeñas en la zona avascular del disco se debe contemplar la posibilidad de tratamiento conservador.
Rehabilitación en lesiones del complejo fibrocartílago triangular no quirúrgicasEn el tratamiento conservador de lesiones no quirúrgicas del CFCT, todos los autores coinciden en una inmovilización de 4 a 6 semanas con yeso u ortesis tipo Münster que bloquee la pronosupinación antebraquial (dejando siempre las articulaciones metacarpofalángicas libres para movilizaciones activas suaves de dedos y así combatir la aparición de edema y rigideces). McIlvain et al.26 establecieron en el 2013 un protocolo perfectamente estructurado por semanas en el que tras la retirada de la inmovilización, comenzaríamos con ejercicios activos y activos asistidos de recuperación de recorridos articulares de muñeca y codo en flexoextensión y pronosupinación. A partir de la 8.a semana podríamos realizar ejercicios pasivos si fuera necesario y comenzaríamos con el trabajo isométrico de flexores y extensores de muñeca. A partir de la 9.a semana se inician ejercicios suaves de fortalecimiento con bandas elásticas. Los ejercicios de prensa con el antebrazo en posición pronada se demorarán hasta la semana 10.a para evitar el efecto varianza cubital positiva27. A este programa debemos añadir el entrenamiento propioceptivo descrito anteriormente desde el momento en que retiramos la inmovilización y siempre con un aumento de requerimientos de manera progresiva.
Lesiones estables del complejo fibrocartílago triangularRehabilitación tras desbridamiento del complejo fibrocartílago triangularLa rehabilitación se centra inicialmente en la cicatrización del tejido, y la inmovilización inicial tendrá el objetivo de disminuir el dolor y el edema posteriores a la intervención. Por tanto, se realizará una inmovilización de una semana con vendaje blando para favorecer la cicatrización de la herida y disminuir el edema de las partes blandas. Se realizarán movilizaciones activas y autoasistidas de los dedos, pudiéndose ayudar con la mano intervenida para conseguir el arco completo.
A partir de la 2.a semana, tras la retirada de la inmovilización, iniciaremos ejercicios activos y autoasistidos de flexoextensión y pronosupinación de muñeca. El objetivo será lograr la movilidad completa. Comenzaremos el trabajo propioceptivo con ejercicios en espejo, ejercicios tenodésicos (flexión de la muñeca con extensión de los dedos y extensión de la muñeca con flexión de los dedos) y FNP mediante diagonales de Kabat.
Los ejercicios de prensa dígito-palmar se iniciarán a partir de la 6.a semana con masilla blanda o ejercitador de prensa, primero en posición neutra o supinación y finalmente con el antebrazo en posición pronada (máxima varianza cubital). Se añadirán ejercicios de propiocepción con pelota o Bosu®.
A partir de la 7.a semana y siempre y cuando desaparezca el dolor se realizarán ejercicios de fortalecimiento con bandas elásticas. A partir de entonces y como fase final de la recuperación, podremos trabajar con Biometrics®, Powerball® y ejercicios pliométricos con pelota.
Aproximadamente a los 3 meses se logra la reincorporación laboral.
Rehabilitación tras la reinserción periféricaEn este tipo de reparaciones es muy importante inmovilizar la pronosupinación del antebrazo durante 6 semanas (con férula braquial durante 4 semanas y luego 2 semanas con férula antebraquial).
Tomando como punto de partida los protocolos de Savoie y O’Brian28 y McIlvain et al.26 proponemos el siguiente programa de recuperación funcional al que hemos añadido los ejercicios propioceptivos explicados anteriormente, como elemento esencial desde la retirada de la inmovilización:
- •
Fase 1: hasta la 6.asemana. Inmovilización estricta de la pronosupinación del antebrazo: yeso braquial con antebrazo en posición neutra durante 4 semanas. A la 4.a semana se cambia por uno antebraquial y se deja el codo libre (a partir de esta semana podría retirarse la férula una vez al día para ejercicios de flexoextensión activa y autoasistida de muñeca). Durante este periodo se instruirá al paciente para la flexoextensión suave de los dedos y las movilizaciones del hombro y raquis cervical29.
- •
Fase 2: de la 6.asemana a la 12.asemana. Recuperación de recorridos articulares: se aconseja el uso de muñequera simple de protección durante 2 semanas más. El objetivo principal será la recuperación del recorrido articular completo de la muñeca y el inicio del trabajo propioceptivo. Se realizarán 3 tipos de ejercicios: activos de flexoextensión del codo, activos de los dedos, activos y autoasistidos de flexoextensión de la muñeca y activos de pronosupinación sin resistencia.
Iniciaremos ejercicios de tipo isométrico de flexoextensión de la muñeca. A partir de la 8.a o 9.a semana se podrán iniciar ejercicios de prensa dígito-palmar suave, primero en posición neutra y finalmente con el antebrazo en pronación. Además se trabajará el control propioceptivo consciente de las posiciones de la muñeca con la terapia en espejo y los ejercicios tenodésicos.
En este periodo evitaremos gestos que impliquen apoyo palmar y coger peso, ya que pueden poner en peligro la reparación.
- •
Fase 3: de la 12.asemana al 5.omes aproximadamente. Fortalecimiento progresivo y preparación para la reincorporación laboral: se continuará con ejercicios de recuperación de recorridos articulares de muñeca (ya podremos trabajar en pasivo).
Iniciaremos el trabajo suave con bandas elásticas de flexoextensión de muñeca siempre que no haya clínica dolorosa.
No está permitida la pronosupinación contra la resistencia hasta el 3.er mes. En cuanto al trabajo propioceptivo, añadiremos progresivamente los rodamientos con pelota, los juegos en el Biometrics E-Link®, Powerball® y pliométricos con pelota blanda y más adelante con balón medicinal.
Aproximadamente a partir del 5.o mes podrá reincorporase a su actividad laboral.
Inmovilización de unas 6 semanas siempre según criterio del cirujano.
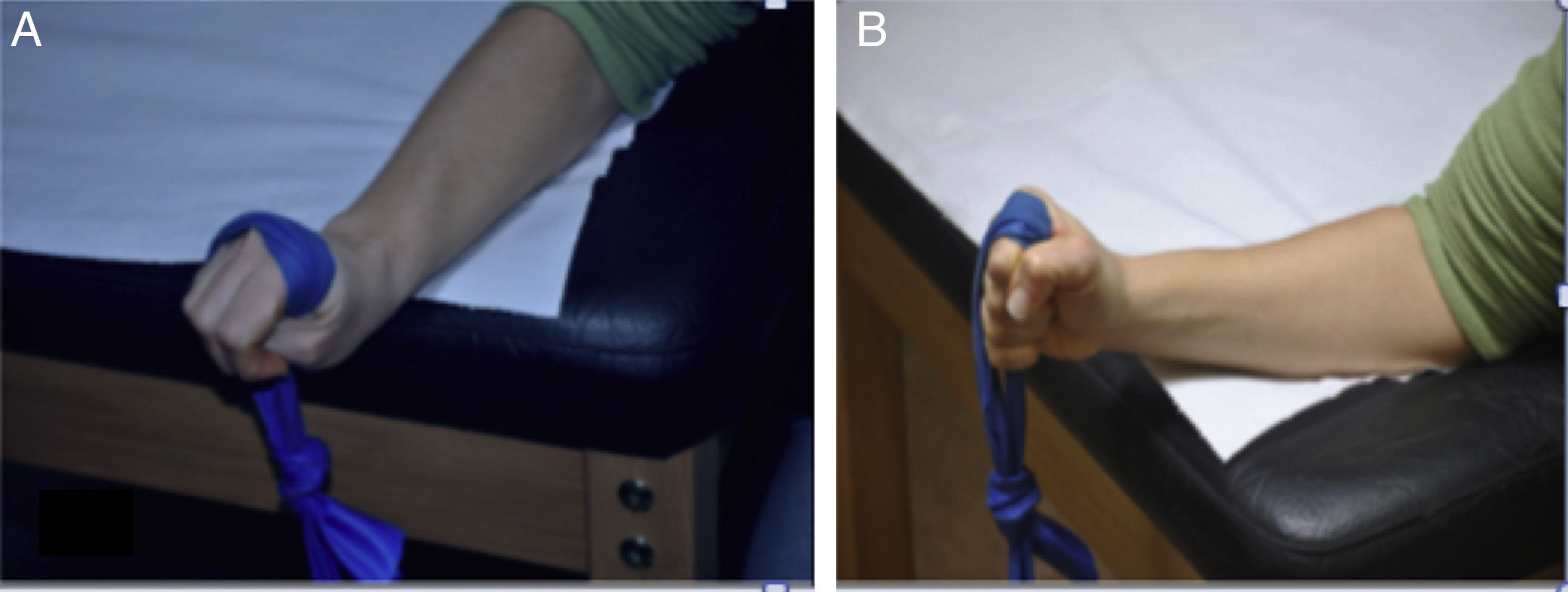
Vamos a seguir el mismo protocolo que las reinserciones periféricas con la salvedad que en este tipo de técnicas en las que la lesión del CFCT ha condicionado inestabilidad de la ARCD, realizaremos ejercicios específicos de fortalecimiento del pronador cuadrado y el ECU como estabilizadores de la misma (fig. 8). Se inicia el trabajo muscular con ejercicios en isométrico a partir de la 6.a semana y con bandas elásticas a partir del 3.er mes y siempre en ausencia de dolor.
 Potenciación selectiva del extensor carpi ulnaris (ECU) mediante una extensión con ligera desviación cubital de la muñeca contra la resistencia de la banda elástica. B) Potenciación selectiva del pronador cuadrado; partiendo de una posición neutra realizaremos una pronación antebraquial contra la resistencia de la banda elástica.")
A) Potenciación selectiva del extensor carpi ulnaris (ECU) mediante una extensión con ligera desviación cubital de la muñeca contra la resistencia de la banda elástica. B) Potenciación selectiva del pronador cuadrado; partiendo de una posición neutra realizaremos una pronación antebraquial contra la resistencia de la banda elástica.
En el caso de las ligamentoplastias demoraremos el trabajo de prensa dígito-palmar al 3.er mes para preservar la plastia (por el efecto varianza cubital).
ConclusionesNo todas las inestabilidades de muñeca van a ser tratadas de la misma manera. Todos los conocimientos biomecánicos de los que disponemos deben ser utilizados como referencia a la hora de establecer el programa rehabilitador. En este siempre irá incluido un apartado imprescindible de reeducación propioceptiva: control de las posiciones de muñeca, rehabilitación neuromuscular consciente y rehabilitación neuromuscular inconsciente.
En las inestabilidades escafolunares, habrá que potenciar selectivamente el ECRL, APL y FCR con el antebrazo en rotación neutra. Está proscrito el trabajo del ECU, que contribuye al aumento de la disociación escafolunar.
En las inestabilidades lunopiramidales, por el contrario, deberemos trabajar selectivamente el ECU como único coaptador del espacio semilunopiramidal.
En las reparaciones del CFCT habrá que distinguir si la lesión ha condicionado inestabilidad de la ARCD o no: si solo se realiza desbridamiento, inmovilizaremos solo una semana y a continuación comenzaremos con la fisioterapia sin restricciones específicas; la desaparición del dolor irá indicando la introducción progresiva de ejercicios. Si hay reinserción periférica, en las reinserciones de ligamentos radioulnares y en las ligamentoplastias habrá que tener más cuidado a la hora de introducir determinados ejercicios. La inmovilización será de unas 6 semanas, a partir de la cual se introducirán ejercicios de recuperación suave de F/E y P/S de muñeca. Los ejercicios de prensa dígito-palmar se demorarán a la 8.a-9.a semana, y los ejercicios de pronosupinación contra resistencia a partir del 3.er mes. En los casos en que la lesión haya condicionado inestabilidad de la ARCD habrá que trabajar selectivamente el pronador cuadrado y el ECU como estabilizadores de la misma. En las ligamentoplastias demoraremos la prensa dígito-palmar hasta el 3.er mes para preservar la plastia y será imprescindible el trabajo muscular de los estabilizadores de la ARCD.
Todos los programas descritos requieren ser validados con estudios prospectivos.
Responsabilidades éticasProtección de personas y animalesLos autores declaran que los procedimientos seguidos se conformaron a las normas éticas del comité de experimentación humana responsable y de acuerdo con la Asociación Médica Mundial y la Declaración de Helsinki.
Confidencialidad de los datosLos autores declaran que han seguido los protocolos de su centro de trabajo sobre la publicación de datos de pacientes.
Derecho a la privacidad y consentimiento informadoLos autores han obtenido el consentimiento informado de los pacientes y/o sujetos referidos en el artículo. Este documento obra en poder del autor de correspondencia.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.