

To compare the different times into which the convention and robotic-assisted laparoscopic pyeloplasty can be divided. To compare the rate of complications between both procedures.
Material and methodsA retrospective study was performed of the patients diagnosed with pyeloureteral junction stenosis and treated with convention and robotic laparoscopic pyeloplasty with more than one year of follow-up. All of the interventions were recorded and visualized. The different times in which the pyeloplasty can be divided were measured. All of the peri- and post-operative complications that occurred in the patients were collected. The non-parametric tests of Kolmogorov–Smirnov and Mann–Whitney U-test for independent samples were applied using a significance level of 0.05.
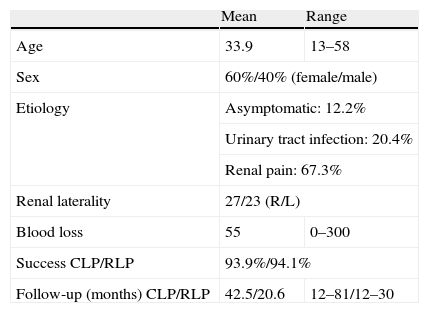
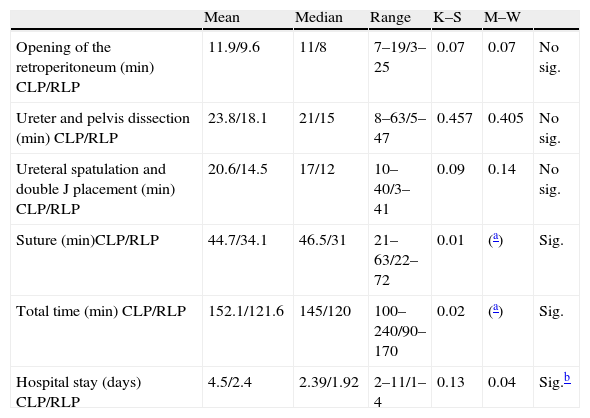
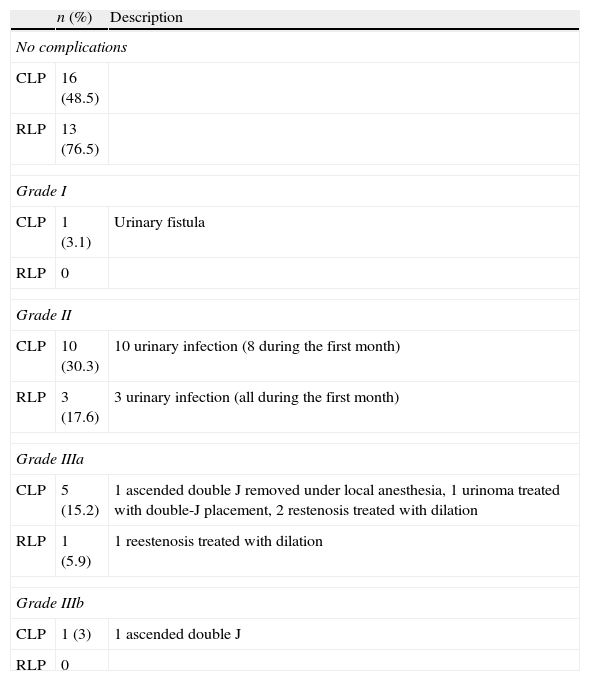
ResultsA total of 50 patients were validated. Thirty three were treated with convention laparoscopy and, 17 with robotic laparoscopy. The suture time, total intervention time and time of hospital stay were lower with a statistically significant difference in the robotic-assisted pyeloplasty. The robotic pyeloplasty had a lower percentage of complications (76.5% vs. 48.5%). The most frequent complications were urinary infections, in relation to the double J. Two restenoses occurred in the conventional laparoscopy and one in the robotic-assisted. The success rate was 93.9% for the conventional laparoscopy and 94.1% for the robotic-assisted one.
ConclusionsAlthough the success rate is similar in both procedures, the robotic pyeloplasty is a very fast procedure and has lower rates of complications than the conventional laparoscopy.
Comparar los diferentes tiempos en que podemos dividir la pieloplastia laparoscópica convencional y robótica. Comparar la tasa de complicaciones entre ambos procedimientos.
Material y métodosEstudio retrospectivo de los pacientes diagnosticados de estenosis de la unión pieloureteral tratados mediante pieloplastia laparoscópica convencional y robótica con más de un año de seguimiento. Se han grabado y revisualizado todas las intervenciones. Se han medido los diferentes tiempos en que podemos dividir la pieloplastia. Se han recogido todas las complicaciones peri y postoperatorias presentadas por los pacientes. Se aplicaron las pruebas no paramétricas de Kolmogorov-Smirnov y la U de Mann–Whitney para muestras independientes utilizando un nivel de significación de 0.05.
ResultadosHan sido válidos 50 pacientes, 33 tratados con laparoscopia convencional y 17 mediante laparoscopia robótica. El tiempo de sutura, tiempo total de la intervención y la estancia hospitalaria han sido menores con una diferencia estadísticamente significativa en la pieloplastia robótica. La pieloplastia robótica ha presentado menor porcentaje de complicaciones (76,5% vs. 48,5%). Las complicaciones más frecuentes fueron las infecciones urinarias, en relación al doble J. Se han producido 2 reestenosis en la laparoscopia convencional y 1 en la robótica. Tasa de éxitos del 93,9% para la laparoscopia convencional y de 94,1% para la robótica.
ConclusionesAunque la tasa de éxitos es similar en ambos procedimientos, la pieloplastia robótica es un procedimiento más rápido y tiene menos tasas de complicaciones que la laparoscopia convencional.