




En la actualidad existen diversas terapias de neurorrehabilitación para personas con secuelas motoras producto a trastornos neurológicos. Las terapias basadas en dispositivos de pedaleo se han destacado por sus ventajas para la recuperación de las funciones motoras, la prevención o tratamiento de las complicaciones respiratorias y cardiovasculares y la inducción de los mecanismos de neuroplasticidad. Los sistemas basados en interfaz cerebro-computadora (ICC) constituyen nuevos enfoques para proveer una rehabilitación que involucre activamente al paciente en la terapia y que este sea capaz de controlar con sus propias señales neurales dispositivos robóticos como las bicicletas estáticas o pedales motorizados.
ObjetivoReflejar el estado actual sobre los sistemas ICC que emplean dispositivos de pedaleo para la terapia de pacientes con trastornos neurológicos.
MétodosSe realizó una revisión sistemática en las bases de datos PubMed y ScienceDirect y otras fuentes como IEEEXplore, revista Sensors y editorial Springer. Se incluyeron estudios originales y reportes de casos de los últimos 10 años basados en sistemas ICC para clasificación de movimiento imaginario de pedaleo a partir de señales de electroencefalografía (EEG); en sujetos sanos y pacientes con enfermedades neurológicas. Se excluyeron trabajos que no mostraron resultados cuantitativos a partir de métricas como la exactitud durante la evaluación. Se evaluó el riesgo de sesgo mediante la Critical Appraisal Skills Programme (CASP).
ResultadosSe incluyeron ocho estudios que cumplían con todos los requerimientos de elegibilidad. La población de sujetos sanos fue de 43, en comparación con seis pacientes con accidente cerebrovascular (ACV) y lesión medular (LM). Una de las limitaciones actuales de los estudios de la comunidad de ICC es la escasez de sujetos para la evaluación de las diferentes metodologías. Las investigaciones no solo arrojaron resultados cuantitativos en cuanto al rendimiento de los algoritmos computacionales implementados, sino también los efectos corticales que han producido durante la realización del ciclismo como terapia de rehabilitación.
DiscusiónDiversos autores han evidenciado que el tratamiento con dispositivos de pedaleo modula la actividad cerebral y muscular. De ahí que existan patrones o características durante la realización de movimientos de pedaleo reales o imaginarios. A partir de esta información, que puede ser extraída mediante señales como la electromiografía superficial (EMGs) o de EEG, es posible la detección de intención de movimiento de pedaleo, por lo cual se puede controlar dispositivos con estos fines, muchos de los cuales ya están disponibles en el mercado.
ConclusiónLas investigaciones sobre sistemas ICC basadas en la detección de movimiento imaginario de pedaleo son recientes y han alcanzado un notable desempeño en la clasificación. Los dispositivos comerciales aún no han incorporado el uso de la terapia de imaginación motora (IM).
Currently there are several neurorehabilitation therapies for people with motor impairments caused by neurological disorders. Therapies based on pedaling devices have stood out for their advantages for the recovery of motor function, the prevention or treatment for respiratory and cardiovascular complications, and the induction of neuroplasticity. The Brain Computer Interface (BCI) systems constitute new approaches to provide a rehabilitation that actively involves the patient in therapy and is capable of controlling robotic devices such as stationary bicycles or motorized pedals with their own neural signals.
AimReflect the current state of BCI systems that use pedaling devices for the therapy of patients with neurological disorders.
MethodsA systematic review was carried out in the PubMed and Science Direct databases and other sources such as IEEEXplore, Sensors magazine and Springer publishing house. Original studies and case reports from the last 10 years based on ICC systems for classification of imaginary pedaling movement from EEG signals were included; in healthy subjects and patients with neurological diseases. Papers that did not show quantitative results from metrics such as accuracy during evaluation were excluded. Risk of bias was assessed using the Critical Appraisal Skills Program (CASP).
Results8 studies that met all eligibility requirements were included. The population of healthy subjects was 43, compared to 6 patients with cerebrovascular accident (CVA) and spinal cord injury (SCI). One of the current limitations of community ICC studies is the scarcity of subjects for the evaluation of different methodologies. The investigations not only yielded quantitative results regarding the performance of the implemented computational algorithms, but also the cortical effects they have produced during cycling as a rehabilitation therapy.
DiscussionVarious authors have shown that treatment with pedaling devices modulates brain and muscle activity. Hence, there are patterns or characteristics during real or imagined pedaling movements. From this information, which can be extracted from surface myoelectric signals (sEMG) or electroencephalography (EEG), it is possible to detect pedaling movement intention, and to control devices for these purposes, many of which are already available in the market.
ConclusionResearch about BCI systems based on the detection of imaginary pedaling movement is recent and has achieved a remarkable performance in classification. Commercial devices have yet to incorporate the use of motor imagery therapy.
Las enfermedades neurológicas se encuentran entre las principales causas de deficiencias en las estructuras y funciones corporales, dando lugar a un aumento global de los años de vida ajustados por discapacidad (AVAD)1,2. Entre estas patologías se destacan por su impacto en la salud pública y las secuelas motoras que producen, las lesiones medulares (LM), la esclerosis múltiple (EM), la enfermedad de Parkinson (EP) y los accidentes cerebrovasculares (ACV). Estos últimos, siendo la segunda causa de muerte entre las enfermedades no transmisibles, ejercen una influencia significativa en el incremento de la discapacidad a nivel mundial2.
Las personas afectadas por estas enfermedades suelen presentar dificultades para realizar actividades de la vida diaria, como caminar. Entre los problemas motores más frecuentes asociados a estas condiciones se incluyen la rigidez muscular, espasticidad, hemiparesia, parálisis, dolor muscular crónico, lentitud en los movimientos, así como dificultades en la coordinación y el equilibrio. Estos síntomas contribuyen a alteraciones en la marcha y afectan la activación de los músculos y la movilidad de las articulaciones en los miembros inferiores y superiores. A medida que estos problemas se agravan, pueden surgir complicaciones respiratorias y cardiovasculares3,4, lo que limita aún más la calidad de vida. Por esta razón, las investigaciones más recientes se han centrado en terapias de rehabilitación que no solo buscan restaurar las capacidades motoras, sino también reducir los factores de riesgo predominantes en estos pacientes3. Entre estas terapias, los ejercicios de pedaleo se destacan como una opción para brindar tales efectos.
En este contexto, se ha reconocido al ciclismo como un ejercicio aeróbico debido a su naturaleza repetitiva y prolongada5. Diversos estudios realizados en pacientes con las patologías mencionadas indican que este tipo de ejercicio puede contribuir significativamente a la recuperación del equilibrio y a una mejora funcional en los parámetros espaciotemporales de la marcha6,7. Además, se ha observado que el ciclismo favorece el mantenimiento del rango de movimiento (RDM) en articulaciones claves como la rodilla y la cadera, así como el incremento de la fuerza muscular y del consumo máximo de oxígeno, lo que, a su vez, mejora la función cardiorrespiratoria7,8.
Las intervenciones con ejercicios de pedaleo también han demostrado ser beneficiosas para el sistema nervioso central (SNC)5,9; pues estimulan procesos fisiológicos que inducen a la neuroplasticidad, como la angiogénesis, la neurogénesis y la sinaptogénesis5,7. Por estos motivos se han desarrollado terapias de neurorrehabilitación que aprovechan los sustratos neurales y los patrones de activación muscular asociados al movimiento cíclico del pedaleo.
En este sentido los sistemas de interacción humano-robot u hombre-máquina (IHR) han sido sugeridos; los cuales, a partir de señales bioeléctricas como las de electroencefalografía (EEG) y electromiografía (EMG), decodifican las intenciones motoras o cognitivas en comandos de control para dispositivos robóticos. Las interfaces cerebro-computadora (ICC) son una variante de los SIHR y se han utilizado ampliamente para asistir y rehabilitar a individuos con déficits neurológicos10. Estos sistemas se han implementado de manera práctica en actividades de la vida cotidiana, complementando una amplia gama de tecnologías comunes en la asistencia y rehabilitación de pacientes con secuelas motoras. Entre estos dispositivos se incluyen: sillas de ruedas11, automóviles autónomos, procesadores de texto, estimuladores eléctricos12, el movimiento de cursores en monitores13,14, tecnologías de realidad virtual15, prótesis robóticas y exoesqueletos16,17. Recientemente, las bicicletas estáticas y los pedales motorizados se han acoplado a las ICC extendiendo su aplicación a las terapias de pedaleo18.
Modalidades de terapia de pedaleoLa terapia con dispositivos robóticos de pedaleo se clasifica, al igual que las terapias convencionales, en modo pasivo, activo y activo asistido19. Estos diferentes enfoques se prescriben según el grado de las secuelas que padece el paciente, el nivel de conciencia de este y las diferentes fases del proceso de rehabilitación en que se encuentran. El ciclismo con estos fines consiste en que los usuarios ejecuten movimientos circulares, similares a los realizados en una bicicleta.
En el ciclismo activo, la persona al pisar o agarrar el pedal es capaz de continuar el ejercicio por sí solo. Durante esta modalidad, el paciente debe ir venciendo gradualmente las resistencias opuestas al movimiento. De esta manera el tratamiento es denominado como resistido y su objetivo principal es el fortalecimiento de los músculos involucrados. En el modo pasivo, los miembros afectados siguen la trayectoria y velocidad programada para los pedales20. Este modo es también empleado en la rehabilitación activa asistida, la cual es aplicada a los pacientes que, debido a la disminución de la fuerza muscular, inician el movimiento activo, pero no son capaces de recorrer todo el arco articular21. En este caso las tecnologías de pedaleo permiten la transición de forma automática o manual del entrenamiento activo al pasivo y viceversa.
El ciclismo pasivo es adecuado al principio de la rehabilitación, pues contribuye a la regulación del tono muscular, relajación de la musculatura y prevención de las dificultades que trae consigo estar inactivo o inmovilizado, disminuyendo así las probabilidades de complicaciones a largo plazo21. El inicio temprano de intervenciones de ejercicios de pedaleo desde la cama en pacientes críticamente enfermos puede ayudar a reducir la sarcopenia y recuperar la fuerza muscular22. También es indicado para reducir la inflamación, aliviar el dolor y recuperar el RDM. Además, se ha comprobado un mejoramiento en el sistema cardiovascular y respiratorio después de la terapia pasiva21,23. Esta modalidad es particularmente útil en pacientes con déficit severo que no tienen control o potencia motriz suficiente para participar en movimientos activos, por ejemplo, sujetos con LM completa23,24. Phadke et al.23 reflejaron en una revisión sistemática notables efectos del ciclismo pasivo en miembros inferiores para personas con esta condición. En las intervenciones clínicas analizadas por estos autores, los efectos positivos fueron más evidentes tras la realización de múltiples sesiones. Entre los efectos cardiovasculares, se observó un incremento del flujo sanguíneo en las piernas con la consecuente disminución de la resistencia vascular periférica. En el sistema musculoesquelético, hubo un mantenimiento e incremento del RDM de las articulaciones y una atenuación de la atrofia muscular. La influencia de los ejercicios pasivos en el SNC también fue evaluada. Los indicadores utilizados mostraron una disminución significativa de la espasticidad (evaluada tras la medición de la amplitud del reflejo H) y de la inhibición intracortical. En los pacientes con EM, el ciclismo pasivo también ha producido estos efectos antiespásticos25,26. Todas estas repercusiones generalmente son apreciadas a partir de la realización de pedaleo activo27, sobre todo en sujetos sanos, de ahí la importancia de conocer que el pedaleo pasivo también produzca efectos similares.
En cuanto al ciclismo activo-asistido, se han observado mejoras en la función motora de pacientes con EP, particularmente el temblor y la bradicinesia28,29. Esta modalidad es aprovechada para su uso con terapias complementarias como la estimulación eléctrica funcional (EEF). Esta técnica ha sido considerada desde hace varios años como un método bien establecido y estandarizado en la rehabilitación de pacientes con enfermedades neurológicas como las ACV30. El ciclismo asistido por EEF contribuye a restaurar el trofismo muscular y aumentar la fuerza muscular3,31. El principio de funcionamiento se basa en estimular las unidades motoras para activar los músculos paralizados o paréticos durante la realización de tareas funcionales. Diferentes estudios han evaluado la eficacia de la EEF combinada con el ciclismo en la recuperación motora, principalmente en pacientes con ACV32,33, LM34 y EM35. Estos beneficios están relacionados con la capacidad aeróbica máxima, el control postural, la espasticidad y la coordinación motora3,30,36,37.
Durante la realización de las diferentes terapias de ciclismo descritas en este apartado, es primordial que los pacientes estén activamente involucrados. Por lo cual, se han incorporado técnicas como la biorretroalimentación38, la realidad virtual39,40 y aún más reciente, los sistemas ICC. En estos últimos, la detección de la intención de movimiento constituye un factor fundamental41. Las señales de electromiografía superficial (EMGs) y las de EEG, se encuentran entre las interfaces más empleadas con este fin42–44. La estrategia de control de los sistemas ICC para detectar el movimiento de los miembros inferiores está generalmente basada en la imaginación motora (IM) y, por ende, las señales de EEG son las más utilizadas45. Durante la IM, el paciente debe imaginar tareas motoras relacionadas con el pedaleo, ya sea, mediante la sensación del músculo al contraerse durante un movimiento real o recibiendo retroalimentación visual del movimiento que pretende realizar. Este paradigma, al involucrar procesos cognitivos, ha resultado en una vía más directa para procurar la participación activa del paciente. Aunque se han realizado revisiones sobre aplicaciones y efectos del ciclismo en la neurorehabilitación motora3, hasta el momento no se han encontrado estudios que analicen las terapias desarrolladas a partir del paradigma de ICC.
Esta revisión tiene como objetivo analizar el estado actual de los sistemas ICC que emplean dispositivos de pedaleo, para la rehabilitación motora de pacientes con enfermedades neurológicas. Por lo cual se describen los sistemas ICC que fueron diseñados según los artículos revisados, y posteriormente se caracterizan algunos de los dispositivos comerciales de pedaleo cíclico que fueron empleados para los experimentos. De esta forma, los desarrolladores comerciales e investigadores académicos pueden perfilar sus tecnologías de pedaleo a partir de la tendencia de los sistemas ICC, en aras del beneficio clínico y social de las personas con disfunciones motoras.
Fundamentos sobre los sistemas ICC basados en pedaleoMuchos estudios de ciclismo han utilizado las señales de EMGs para comprender mejor cómo funcionan los músculos durante las diferentes fases del movimiento. Una de las particularidades observadas ocurre durante la fase de propulsión del pedaleo, donde la mayoría de los pares de músculos agonistas/antagonistas se activan juntos para generar torques durante esta fase. El análisis está basado en los tiempos de inicio y final de la contracción muscular y los niveles de amplitud alcanzados, sincronizados con mediciones cinemáticas o dinámicas del movimiento como el ángulo, la aceleración o la velocidad angular, torque, potencia o de marcadores de tiempo con el uso de codificadores en la manivela de la bicicleta o del pedal motorizado. Con ellos se ha demostrado que las personas sanas tienen patrones de coordinación intermusculares predecibles durante el pedaleo; los cuales también están relacionados con la cadencia o revoluciones por minutos, la posición del cuerpo, así como con la carga de entrenamiento a la cual es sometido el usuario. Estos patrones suelen ser alterados en pacientes con discapacidades motoras debido a cambios que sufren los músculos, como el acortamiento46. De ahí que la señales de EMGs permiten detectar los grupos musculares dañados y enfocar el entrenamiento hacia estos42,47.
En cuanto a la actividad cerebral durante el pedaleo, esta se ha medido utilizando modalidades de imagen médica como la tomografía por emisión de positrones48, la estimulación magnética transcraneal49, y la resonancia magnética funcional50. Por medio de estas técnicas, se ha demostrado que las estructuras corticales primarias están activas durante el pedaleo, tanto activo como pasivo. Dado que estas técnicas se basan en respuestas hemodinámicas y metabólicas, la resolución temporal necesaria para determinar la sincronización de la actividad cerebral en relación con el ciclo de pedaleo es baja. En consecuencia, el uso de la EEG para monitorear la actividad cortical durante el pedaleo es ventajoso, ya que permite una alta resolución temporal (aproximadamente 1ms), y a la vez es una técnica no invasiva y de bajo costo en comparación con las convencionales43.
Las señales de EEG ofrecen información en los dominios del tiempo, la frecuencia y espacial, incluyendo los mapas topográficos. Estas señales también han reflejado la presencia de activación en las áreas somatosensorial primaria, corteza motora primaria y suplementaria, durante la realización de tareas motoras cíclicas48, incluyendo la marcha y el ciclismo7,51.
Al analizarse la señal de EEG en el dominio frecuencial y durante la actividad de pedaleo, la modulación que ocurre en potencia de la señal es predominante en las bandas de frecuencias correspondientes al ritmo beta (baja: 13-22Hz y alta: 23-30Hz)44. Esta modulación de la actividad cerebral se traduce en los potenciales relacionados a eventos de desincronización y sincronización (DRE/SRE)52. Generalmente se observa una desincronización o disminución en la potencia de la señal en la banda beta, la cual es asociada a las tareas sensitivomotoras corticales con un incremento de la excitabilidad cerebral43,44. Este patrón es observado en el área de representación de la pierna en la corteza motora (electrodo Cz)44. Mientras que, en sujetos con déficit neurológicos, tales patrones pueden verse afectados. Por ejemplo, Singh et al.53 encontraron un aumento de la potencia en la banda beta en el canal Cz de pacientes con EP, durante la realización de movimientos de pedaleo. Mientras que, Nakatani et al.54 evidenciaron potenciales DRE en paciente con LM en la banda beta alta.
En el dominio temporal también se han observado cambios prominentes de amplitud en las formas de onda de EEG dando lugar a los potenciales corticales relacionados con el movimiento que son indicadores de las etapas de preparación y ejecución de una acción voluntaria55,56. Jain et al. concluyeron que el pedaleo produce cambios lentos en los potenciales cerebrales con una frecuencia del doble de la frecuencia de pedaleo, correlacionados con la actividad de los músculos de transición, lo que sugiere la modulación de la actividad cerebral durante las diferentes fases del ciclo43. Estos autores evidenciaron en el canal Cz la presencia de dos picos positivos (P1 y P2) durante 25 y 75% del ciclo de pedaleo respectivamente, ambos separados por un pico negativo (N1). La amplitud pico a pico de la onda del EEG fue significativamente mayor en los movimientos pasivos en comparación con los activos mientras que la potencia de la banda central fue significativamente menor en las pruebas activas, de ahí que exista diferencia en la activación cortical en ambos tipos de pedaleo. Aun así, según refieren Jain et al., en algunas investigaciones no se encontraron diferencias significativas entre los efectos del pedaleo activo y pasivo en el área cortical43.
Los patrones observados en las señales de EEG y de EMGs durante el pedaleo han sido aprovechados por los SIHR. Entre estos sistemas, las ICC han surgido como tendencia en la neurorrehabilitación. Considerando que las vías naturales del SNC en las personas con trastornos neurológicos y/o ACV para responder ante estímulos externos e internos, han sido afectadas, una ICC constituiría un sistema capaz de medir la actividad del SNC y convertirla en salidas artificiales que permiten reemplazar, restaurar, mejorar, y complementar la vía natural dañada, ya sea neuromuscular u hormonal. En este sentido, una ICC cambia no solo las respuestas del SNC sino también la forma de captar y procesar la información sensorial que proviene del entorno, proporcionando así mecanismos de retroalimentación57.
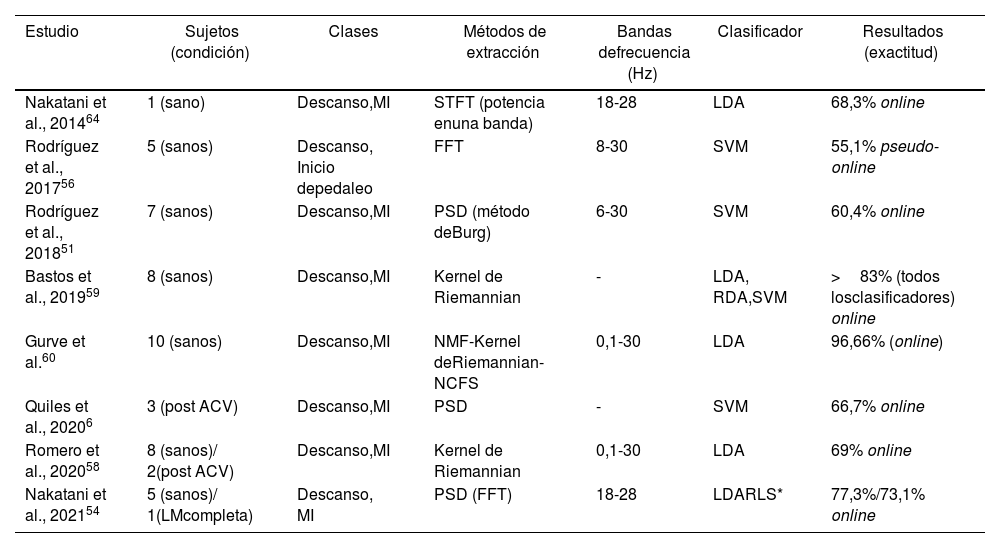
Dentro de las ICC, las basadas en IM son una de las más empleadas. Debido a que imaginar un movimiento es un proceso cognitivo, estos sistemas son ideales para la reorganización y conectividad de las áreas cerebrales afectadas y que comparten muchos de los mecanismos neuronales implicados en la ejecución del movimiento6. Además, la perspectiva va más allá del proceso de rehabilitación constituyendo una alternativa para las secuelas permanentes en las extremidades. La ICC puede utilizar la tarea de imaginar un movimiento determinado u otra tarea específica sin ejecutarla físicamente, para ser llevada a cabo por el dispositivo robótico externo (p. ej., exoesqueleto, prótesis). En este contexto, la señal de EEG constituye la más utilizada como entrada al sistema18. Aunque se ha investigado mucho sobre las ICC en las últimas décadas, el control de dispositivos de pedaleo basado en IM es un campo muy reciente (ver años de los estudios en la tabla 1). Ante un dispositivo de pedaleo, se pretende que el usuario imagine la acción de mover los pedales o intente ejecutarlo por sí mismo; esto activaría mediante señales de control, ya sea, la rotación del motor, el sentido o dirección del movimiento, la velocidad, torque, etc. El objetivo de los investigadores, según los estudios analizados, consiste principalmente en detectar la intención de iniciar el pedaleo y diferenciarlo del periodo de descanso o no movimiento. Los estudios pretenden contribuir a las siguientes aplicaciones: mover una silla de ruedas mediante la acción de pedalear54; recibir pedaleo pasivo y asistido, donde el paciente sea capaz de iniciar los movimientos56,58, y participar activamente en juegos serios con realidad virtual59. Debido a que uno de los enfoques actuales de los sistemas basados en IM es la rehabilitación de la marcha60, la mayoría de los sistemas emplearon pedales motorizados independientes para miembros inferiores. El ciclismo es considerado como una actividad de locomoción que genera patrones similares a los de la marcha y que incluso permite de manera indirecta mejorar parámetros espacios-temporales de esta, como la cadencia y longitud de los pasos7. También contribuye a la activación de los músculos involucrados en la actividad de caminar, al aumento de la fuerza muscular durante la flexión plantar y el equilibrio61. Por el mismo motivo, los ACV y la LM, fueron las enfermedades neurológicas en las que más énfasis hicieron los autores, debido a que entre las principales secuelas que más limitan a los pacientes con tales trastornos se encuentran la espasticidad y la parálisis de una o ambas piernas.
Estudios sobre clasificación de MI durante pedaleo
| Estudio | Sujetos (condición) | Clases | Métodos de extracción | Bandas defrecuencia (Hz) | Clasificador | Resultados (exactitud) |
|---|---|---|---|---|---|---|
| Nakatani et al., 201464 | 1 (sano) | Descanso,MI | STFT (potencia enuna banda) | 18-28 | LDA | 68,3% online |
| Rodríguez et al., 201756 | 5 (sanos) | Descanso, Inicio depedaleo | FFT | 8-30 | SVM | 55,1% pseudo-online |
| Rodríguez et al., 201851 | 7 (sanos) | Descanso,MI | PSD (método deBurg) | 6-30 | SVM | 60,4% online |
| Bastos et al., 201959 | 8 (sanos) | Descanso,MI | Kernel de Riemannian | - | LDA, RDA,SVM | >83% (todos losclasificadores) online |
| Gurve et al.60 | 10 (sanos) | Descanso,MI | NMF-Kernel deRiemannian-NCFS | 0,1-30 | LDA | 96,66% (online) |
| Quiles et al., 20206 | 3 (post ACV) | Descanso,MI | PSD | - | SVM | 66,7% online |
| Romero et al., 202058 | 8 (sanos)/ 2(post ACV) | Descanso,MI | Kernel de Riemannian | 0,1-30 | LDA | 69% online |
| Nakatani et al., 202154 | 5 (sanos)/ 1(LMcompleta) | Descanso, MI | PSD (FFT) | 18-28 | LDARLS* | 77,3%/73,1% online |
FFT: transformada rápida de Fourier; LDA: análisis discriminante lineal; MI: movimiento imaginario; NCFS: selección de características basado en componentes de una vecindad; NMF: factorización de matrices no negativas; PSD: densidad espectral de potencia; RDA: análisis discriminante regularizado; STFT: transformada de Fourier de tiempo corto; SVM: máquinas de vectores de soporte.
En esta revisión se siguieron las pautas de la guía Preferred Reporting Items for Systematic reviews and Meta-Analyses (PRISMA) para la publicación de revisiones sistemáticas, en su versión actualizada en el 202062.
Criterios de inclusión:
- 1.
Estudios realizados en el periodo 2011-Noviembre de 2021.
- 2.
Estudios originales o reportes de casos basados en sistemas ICC para clasificación de movimiento imaginario de pedaleo a partir de señales de EEG.
- 3.
Estudios realizados en pacientes sanos y/o con enfermedades neurológicas (LM, EM, EP y ACV), orientados a la rehabilitación motora mediante la terapia de pedaleo para miembros superiores y/o inferiores.
Criterios de exclusión:
- 1.
Estudios que no informen o brinden detalles sobre los resultados cuantitativos a partir de métricas como la exactitud durante la evaluación del sistema ICC implementado.
- 2.
Estudios enfocados en la terapia cognitiva.
- 3.
Otras patologías.
Los estudios fueron agrupados según la metodología diseñada para la implementación de los sistemas ICC. Se establecieron una serie de criterios de comparación o categorías, los cuales fueron presentados en forma de tabla resumen con cada aspecto notable a tener en cuenta en el diseño de un sistema de reconocimiento de patrones: extracción de características, clases a discriminar, bandas de frecuencias a partir del espectro de las señales de EEG, clasificador, y resultados de la evaluación (tabla 1). También fueron incluidos la cantidad de sujetos sanos y/o patológicos y el tipo de patología presentada. A partir de esta forma de extracción de los datos, se procedió a realizar una síntesis narrativa de como se comportó cada variable, permitiendo analizar si hubo patrones comunes o variaciones significativas. También se hizo referencia a las limitaciones y desafíos que tuvieron los autores durante la realización del protocolo de experimentación.
Fuentes de información, estrategias de búsqueda y proceso de selecciónLas bases de datos bibliográficas electrónicas consultadas primeramente fueron: Pubmed/Medline (cuatro resultados) y ScienceDirect (18 resultados). En estas no se obtuvieron resultados que cumplieran con los criterios de elegibilidad. Los artículos de interés fueron encontrados por medio del motor de búsqueda avanzada Google Académico (https://scholar.google.com/). Posteriormente se dirigió la búsqueda de artículos relacionados hacia la base de datos de IEEEXplore, la revista Sensors y la editorial Springer. Entre las palabras claves consideradas estuvieron las siguientes:
- 1.
Brain-Computer Interface OR Brain-Machine Interface
- 2.
Pedaling OR cycling
- 3.
Motor imagery
De esta manera se formaron los tesauros: A: 1 AND 2, y B: 1 AND 2 AND 3.
Con el tesauro B se redujo la cantidad de artículos como resultado de la búsqueda en Google Académico a aproximadamente 190 artículos. Mientras que las bases de datos consultadas de forma independiente fueron más sensibles al tesauro A. A esta búsqueda automatizada, la cual fue realizada por orden de relevancia, excluyendo los artículos de revisión y para todos los idiomas, le prosiguió una búsqueda más selectiva enfocada en las palabras claves resaltadas por el buscador, en los artículos en idioma inglés y con títulos sugerentes. Luego se utilizó la opción de Artículos Relacionados y de las citas realizadas por otros autores.
Una vez obtenidos a simple vista los artículos con mayor semejanza a los criterios de elegibilidad, se procedió a la lectura del Abstract para la selección de aquellos que describieran el sistema ICC implementado y los resultados arrojados, así como las clases seleccionadas para la discriminación de movimiento imaginario, y la posible mención o referencia a un dispositivo de pedaleo.
Entre las principales dificultades para la selección estuvo el tener que distinguir entre un sistema ICC basado en un problema de reconocimiento de patrones, que es el enfoque de la revisión, y un sistema ICC basado solamente en terapia de neuro retroalimentación mediante la técnica de EEG cuantitativo. Ambos tipos de sistemas son considerados en la literatura científica como ICC. Esto conllevó a la lectura completa de varios artículos. Otro obstáculo fue la presencia de investigaciones por los mismos grupos de autores basados en una misma metodología previamente descrita en un primer artículo, pero con diferentes enfoques para su publicación. Por lo cual, solo se seleccionó el artículo con mayor relevancia y mayor descripción del diseño del sistema ICC. No obstante, los otros artículos permitieron obtener el resto de las variables de la tabla 1, así como detalles sobre los efectos del sistema implementado en la recuperación o mejoramiento de la función motora de los sujetos. Se mantuvieron aquellos que variaban en algún aspecto considerable la metodología, por ejemplo: método de extracción de características y clasificador.
Evaluación del riesgo de sesgo y medidas del efectoSe evaluó el riesgo de sesgo mediante la Critical Appraisal Skills Programme (CASP), en su versión en español (CASPe). Los autores trabajaron en dúos de manera independiente para cada artículo. Luego se compararon las evaluaciones realizadas para llegar a consenso.
En lo relacionado al desempeño alcanzado por los sistemas ICC implementados, se utilizó como métrica común la Exactitud.
Resultados y discusiónComo resultado del proceso de selección se obtuvieron ocho estudios que cumplían con todos los requerimientos de elegibilidad (fig. 1). En la tabla 1 se refleja el desempeño obtenido por los sistemas ICC basados en IM de movimientos de pedaleo e implementados por los autores. A continuación, se presenta una síntesis de los parámetros de interés extraídos de cada estudio y el desafío que presentaron los autores para realizar los protocolos.

Los experimentos fueron realizados tanto en sujetos sanos como pacientes con déficit neurológico. La población de sujetos sanos fue de 43, en comparación con seis sujetos patológicos con ACV y LM. Generalmente una de las limitaciones actuales de los estudios de la comunidad de ICC es la escasez de sujetos para la evaluación de las diferentes metodologías; no obstante, es meritorio los resultados obtenidos en pacientes a los cuales van destinados estos sistemas de neurorrehabilitación, destacando la tendencia a la inclusión de más personas con secuelas de enfermedades neurológicas. Según refiere Quiles et al.6, para estos estudios es fundamental tener sujetos con características similares para el grupo experimental y el grupo de control, pero reclutar pacientes con las mismas afecciones es a la vez el principal desafío. Además, diferentes condiciones de rehabilitación tras varios días pueden afectar la evaluación clínica. En algunos casos, solo fueron evaluados sujetos sanos, debido a que uno de los objetivos es lograr primeramente que los sistemas sean exactos y precisos en la detección de intención de movimiento, lo cual permitiría una mejor referencia para comparar en la intervención con sujetos patológicos. También contribuye a evaluar el efecto cortical durante la tarea de IM y/o ejecución de la acción de pedaleo y detectar patrones visibles en las señales de EEG que permitan un control más intuitivo del dispositivo54,63.
Para comprender la tabla 1, se deben considerar las diferentes etapas que componen un sistema ICC: adquisición de la señal, preprocesamiento, extracción y selección de características y clasificación57. Las señales de EEG fueron adquiridas mediante electrodos superficiales ubicados en el cuero cabelludo según el Sistema Internacional 10-20/10-10. Las diferentes distribuciones de electrodos tuvieron presente la actividad cortical que se evidencia durante la realización de ciclismo en las áreas del cerebro mencionadas en el apartado anterior. En esta etapa de adquisición las mayores consideraciones realizadas por los autores estuvieron en la disminución del número de electrodos necesarios para una correcta clasificación, evaluación del efecto cortical a partir de las señales adquiridas por Cz, y en la selección automática y adaptativa de canales de EEG con mayor contribución al reconocimiento de las tareas a clasificar56,60,63. Gurve et al.60 lograron disminuir la cantidad de electrodos necesarios de 19 a 13, en algunos casos hasta 10 electrodos, mediante un método de selección de canales basados en factorización de matrices no negativas. Este método tiende a seleccionar solo algunos canales entre aquellos altamente correlacionados. Rodríguez et al.56 propusieron ocho configuraciones con una menor cantidad de electrodos, sin embargo, el desempeño fue relativamente bajo y aunque la selección es específica para cada sujeto, puede que otras configuraciones no establecidas ofrezcan mejores resultados.
Las investigaciones no solo arrojaron resultados cuantitativos en cuanto al rendimiento de los algoritmos computacionales implementados sino también los efectos corticales que han producido durante la realización del ciclismo como terapia de rehabilitación. Cardoso et al.63 realizaron un estudio a partir del sistema descrito por Romero et al.58, para comprobar tales efectos durante la aplicación de un sistema ICC basado en IM para el control de un pedal motorizado. La mayoría de los sujetos produjeron, sobre el área del pie, patrones significativos de DRE alrededor del canal Cz al realizar IM y recibir pedaleo pasivo como retroalimentación y respuesta del sistema. Los resultados revelaron la activación de la corteza motora primaria y la conectividad entre el área motora suplementaria y las regiones parietales.
Según la tabla 1, las investigaciones utilizaron la información correspondiente a las bandas de frecuencia del ritmo beta, donde se ha evidenciado la disminución de la magnitud de los potenciales DRE en comparación con el periodo de descanso o relajación54,58,63, expresándose en características discriminatorias bien definidas. Cardoso et al.63 observaron en la mayoría de los participantes una disminución de potencia sobre la corteza motora primaria para las bandas beta, principalmente en la parte baja, mientras realizaban IM y recibían retroalimentación. Nakatani et al.54,64 utilizaron la banda beta alta en la detección de intención de movimiento de pedaleo, a pesar de que en la banda beta baja es donde se observa mayor amplitud en la distribución espectral de potencia.
Aunque justifican la selección de la banda beta en comparación con la banda μ, no es clara la preferencia por la región de 18-28Hz. En cuanto al periodo de descanso, tanto en la banda μ como en la beta, evidencian que la potencia es mayor, por lo cual aumenta el poder de discriminación en la etapa de clasificación al utilizarse la densidad espectral de potencia (PSD) como método de extracción de característica y diferenciar entre las clases de IM y descanso.
Los métodos de extracción de características están basados en la capacidad discriminatoria de los potenciales DRE/SRE. De ahí que la distribución espectral de potencia y sus variantes a partir de las transformadas de Fourier sean unos de los más utilizados. Además, le caracteriza un bajo requerimiento computacional debido al método de la transformada rápida de Fourier. A partir del uso de la PSD, los autores seleccionaban la frecuencia o el rango de frecuencias que permitía mayor separabilidad entre las clases. No obstante, se debe tener en cuenta que las señales de EEG son no estacionarias y son afectadas por ruido. Los filtros espaciales como las matrices de covarianza de Riemannian son métodos a tener en cuenta cuando se incluyen estos factores65,66. Los estudios que utilizaron este método obtuvieron valores de exactitud mayores que 80% en la clasificación. Otro aspecto a considerar son los métodos de selección de características que permiten optimizar el sistema. Gurve et al.60 emplearon un método de selección de características basado en el vecino más cercano, el cual según los autores es simple, rápido y menos propenso al sobre entrenamiento.
La clasificación como se ha mencionado anteriormente fue enmarcada principalmente en dos clases: descanso e IM de pedaleo. Sin embargo, en el estudio realizado por Rodríguez et al.56 las tareas de IM a clasificar fueron: periodo de descanso e inicio de pedaleo. El inicio de pedaleo fue considerado en dos formas: (1) un periodo de dos segundos antes del movimiento de pedaleo, y (2) dos periodos de dos segundos, antes y después de iniciado el movimiento. Los autores se basaron en el estudio de Toffanin et al.67, donde se aborda que los potenciales DRE/SRE generados durante la intención de movimiento aparecen dos segundos antes del inicio del movimiento y durante los dos segundos posteriores. Hasta el momento de la revisión los investigadores han definido el uso de dos de los clasificadores binarios lineales más utilizados por la comunidad de ICC: máquinas de vectores de soporte y análisis discriminante lineal (LDA)66,68. LDA continúa siendo el de más bajo requerimiento computacional y más rápido a su vez, las ventajas que fueron demostradas por Romero et al.58. Según Nakatani et al.64, la metodología aplicada en su trabajo consiste en una forma de mejorar el rendimiento de la clasificación convencional con LDA usando un filtro espacio-temporal recursivo, teniendo en cuenta los patrones pasados y actuales. El filtro utilizado estuvo basado en los coeficientes autorregresivos obtenidos mediante un algoritmo de mínimos cuadrados recursivos. La expresión matemática resultante posee una estructura similar al modelo de clasificación LDA convencional, lo que motivó a los autores a establecer una comparación con este método (ver resultados obtenidos en tabla 1).
En lo relacionado al desempeño alcanzado por los sistemas ICC implementados, los investigadores han empleado como métrica común la exactitud, la cual como se evidencia en la tabla 1, es un medidor aun mejorable. Varios autores han obtenido el valor predictivo positivo y razón de falsos positivos. Vale destacar que las investigaciones han reflejado sus resultados en tiempo real, lo cual se debe a la portabilidad de los sistemas de pedaleo como los pedales motorizados y a la sencillez de su ejecución pues solo se ha utilizado un motor como actuador final. Uno de los elementos a tener en cuenta en el control de estos pedales motorizados a partir de un sistema ICC basado en IM es la latencia de los usuarios al pedalear, que es el tiempo transcurrido entre la detección de la IM y la ejecución del dispositivo como respuesta del sistema, siendo a su vez una retroalimentación sensorial y un parámetro que los investigadores tratan de disminuir. En la investigación de Romero et al.58 se logró valores de latencia bajos en los pacientes con ACV, de aproximadamente dos segundos.
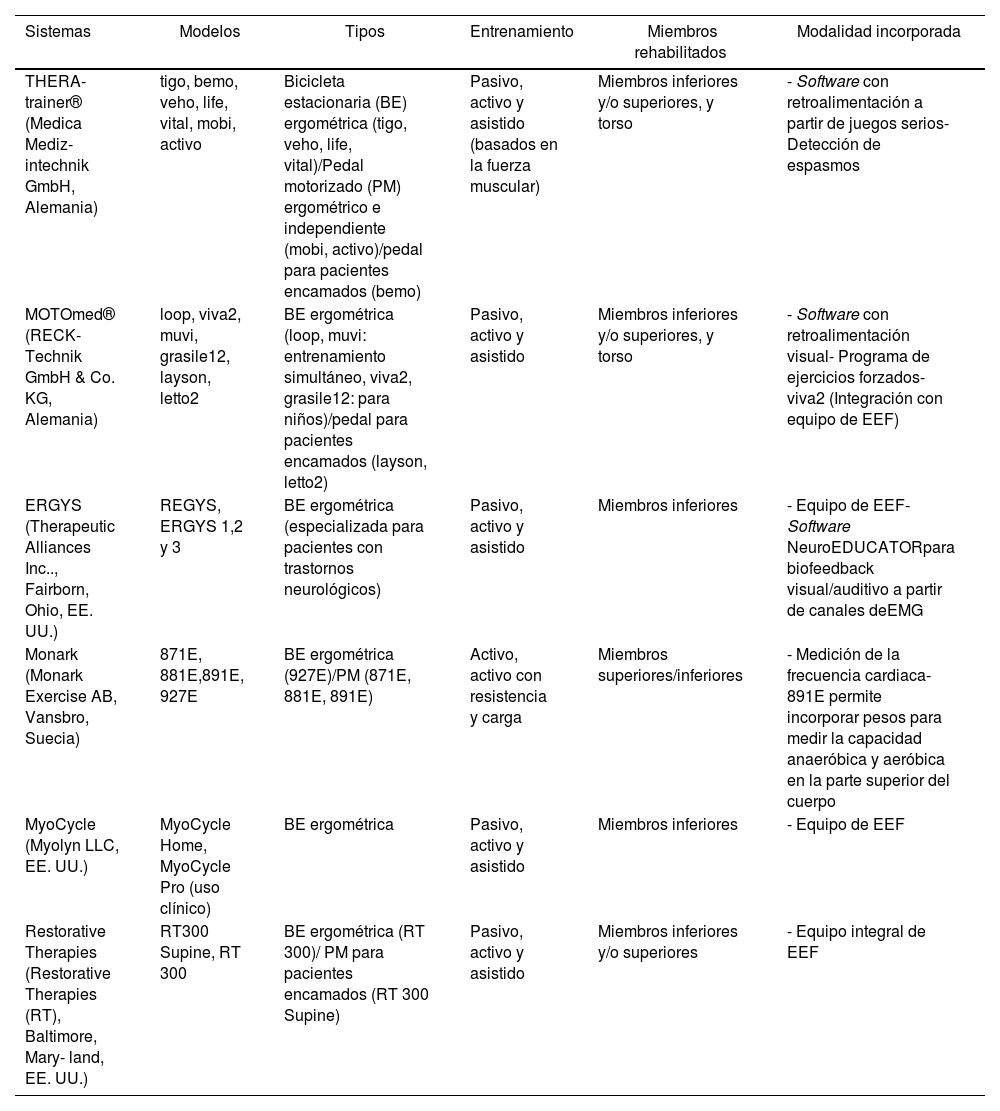
Dispositivos comerciales de pedaleo para rehabilitaciónEn los estudios revisados sobre ICC se utilizaron diferentes dispositivos comerciales de pedaleo. La ergometría acompaña a la mayoría de estas tecnologías permitiendo la medición en tiempo real de parámetros de entrenamiento como el número de revoluciones/min, potencia, consumo de energía (kcal), recorrido (km), etc. Los dispositivos tecnológicos pueden ser adaptados para pacientes geriátricos y pediátricos. Contribuyen, además, a la prevención de caídas, la reeducación muscular y del equilibrio, la propiocepción, el fortalecimiento y control del tronco y el trabajo de la fuerza muscular3,69.
El principio de entrenamiento de patrones motores repetitivos, asociado al incremento en la calidad del movimiento, facilita el reaprendizaje motor. Durante las terapias se proporcionan estímulos sensoriales, motores y cognitivos a través del movimiento y la biorretroalimentación, ya sea mediante juegos serios o el uso de realidad virtual70. Bastos et al.59 diseñaron un sistema ICC para ser aplicado durante la realización de juegos serios en una plataforma virtual. El modelo a controlar era un triciclo reclinado donde el paciente necesita pedalear para avanzar con la bicicleta y cubrir cierta distancia en el juego. Los logros alcanzados se le informaban al paciente, promoviendo la motivación para mejorarlos. Esto evidencia que los sistemas ICC siguen la misma tendencia de las plataformas comerciales de pedaleo.
Los dispositivos de pedaleo se clasifican principalmente en dos formas: cicloergómetros o bicicletas estacionarias ergométricas y pedales motorizados. Las bicicletas estacionarias pueden estar diseñadas para permitir el uso del pedal motorizado de forma independiente. Algunas son reclinadas permitiendo que el paciente se recueste. También, pueden presentar pedales tanto para miembros inferiores y superiores. En cuanto a los pedales motorizados, algunos permiten el intercambio de los mismos para los pies por manivelas para las manos, también el pedaleo bidireccional y de un solo miembro (izquierdo o derecho). Además, por medio de una unidad movible con pivote posibilita que el paciente encamado realice el pedaleo para ambos miembros. Estos ergómetros permiten modos activos y pasivos de ciclismo, así como el asistido posibilitando la transición de forma automática del entrenamiento pasivo al entrenamiento activo o viceversa. En el modo pasivo es posible configurar la cadencia inicial. La mayoría incluye varios niveles de resistencia; en el caso de los equipos ERGYS, estos realizan un control a lazo cerrado regulando la resistencia según la fuerza ejercida a los pedales.
Los dispositivos mostrados en la tabla 2 se encuentran entre los líderes en el mercado y están especializados en la rehabilitación física de pacientes con enfermedades neurológicas. Algunos como MOTOmed (modelos viva2 Parkinson, loop p.l y loop p.la) y THERA-trainer han sido diseñados específicamente para el tratamiento de pacientes con ED y ERGYS (1 y 2) para LM, aunque pueden ser usados para tratar diferentes discapacidades. Los modelos presentados tienen programas de entrenamiento preconfigurados para las enfermedades más comunes y secuelas como la espasticidad, también para pacientes con patologías cardiovasculares operados de articulaciones como la rodilla y la cadera. Estos son programados mediante una interfaz de usuario o un mando de control con pantalla. Algunos de estos softwares pueden ser utilizados en una computadora conectada vía inalámbrica al equipo.
Dispositivos comerciales de pedaleo para rehabilitación
| Sistemas | Modelos | Tipos | Entrenamiento | Miembros rehabilitados | Modalidad incorporada |
|---|---|---|---|---|---|
| THERA-trainer® (Medica Mediz- intechnik GmbH, Alemania) | tigo, bemo, veho, life, vital, mobi, activo | Bicicleta estacionaria (BE) ergométrica (tigo, veho, life, vital)/Pedal motorizado (PM) ergométrico e independiente (mobi, activo)/pedal para pacientes encamados (bemo) | Pasivo, activo y asistido (basados en la fuerza muscular) | Miembros inferiores y/o superiores, y torso | - Software con retroalimentación a partir de juegos serios- Detección de espasmos |
| MOTOmed® (RECK-Technik GmbH & Co. KG, Alemania) | loop, viva2, muvi, grasile12, layson, letto2 | BE ergométrica (loop, muvi: entrenamiento simultáneo, viva2, grasile12: para niños)/pedal para pacientes encamados (layson, letto2) | Pasivo, activo y asistido | Miembros inferiores y/o superiores, y torso | - Software con retroalimentación visual- Programa de ejercicios forzados- viva2 (Integración con equipo de EEF) |
| ERGYS (Therapeutic Alliances Inc.., Fairborn, Ohio, EE. UU.) | REGYS, ERGYS 1,2 y 3 | BE ergométrica (especializada para pacientes con trastornos neurológicos) | Pasivo, activo y asistido | Miembros inferiores | - Equipo de EEF- Software NeuroEDUCATORpara biofeedback visual/auditivo a partir de canales deEMG |
| Monark (Monark Exercise AB, Vansbro, Suecia) | 871E, 881E,891E, 927E | BE ergométrica (927E)/PM (871E, 881E, 891E) | Activo, activo con resistencia y carga | Miembros superiores/inferiores | - Medición de la frecuencia cardiaca- 891E permite incorporar pesos para medir la capacidad anaeróbica y aeróbica en la parte superior del cuerpo |
| MyoCycle (Myolyn LLC, EE. UU.) | MyoCycle Home, MyoCycle Pro (uso clínico) | BE ergométrica | Pasivo, activo y asistido | Miembros inferiores | - Equipo de EEF |
| Restorative Therapies (Restorative Therapies (RT), Baltimore, Mary- land, EE. UU.) | RT300 Supine, RT 300 | BE ergométrica (RT 300)/ PM para pacientes encamados (RT 300 Supine) | Pasivo, activo y asistido | Miembros inferiores y/o superiores | - Equipo integral de EEF |
Las investigaciones sobre los efectos de la terapia de pedaleo en la rehabilitación usualmente incluyen en la descripción de sus protocolos el empleo de estos dispositivos. Pocos estudios se refieren a la evaluación de la eficacia o utilidad y a la caracterización de las tecnologías en el proceso de rehabilitación. Esto puede ser debido a las abundantes referencias sobre la aplicabilidad de las terapias de ciclismo en la recuperación de los pacientes con secuelas motoras de patologías neurológicas. No obstante, en el caso de la marca THERA-trainer, la empresa presenta evidencias sobre los efectos de sus dispositivos en la rehabilitación, incluyendo las opiniones positivas y negativas de fisioterapeutas y testimonios reales de usuarios. Esto fortalece la industria de dispositivos de pedaleo con fines terapéuticos, además que han sido contemplados como dispositivos médicos y se ajustan a las normas establecidas. MOTOmed ha sido una de las terapias más conocidas y estudiadas. Cuiling et al.71 realizaron un metaanálisis, donde llegaron a la conclusión que esta terapia combinada con los métodos tradicionales de rehabilitación mejora en pacientes hemipléjicos la movilidad y la capacidad de realizar actividades de la vida diaria.
Las compañías han aumentado la versatilidad de sus productos, al posibilitar que los dispositivos puedan ser empleados con pacientes en silla de ruedas, con pie equinovaro o prótesis de piernas o del miembro superior. Además, venden accesorios para usos específicos como: soportes para pantorrillas y antebrazos, apoya manos, soportes para silla de ruedas con el fin de evitar su corrimiento, electrodos, entre otros. Las cintas elásticas permiten la fijación de la pierna parética a los pedales manteniéndola en la posición correcta y evitando un movimiento indebido durante los ejercicios. Modelos como el THERA-trainer bemo, MOTOmed layson y letto2 incorporan una unidad motriz para la rehabilitación de miembros inferiores y superiores desde la cama/camilla para pacientes ingresados en la Unidad de Cuidados Intensivos, ya sea acostados, en posición supina o semisentado. Debido a que permiten estas posturas, los dispositivos de pedaleo se encuentran entre los recomendados para pacientes con riesgo de caída y pérdida de equilibrio72. En la realización de los protocolos experimentales para sistemas ICC con pedales motorizados, Quiles et al.6 recomiendan que la posición del paciente y el pedal motor deben considerarse de tal forma que se evite movimientos involuntarios durante el ciclismo, ya que la pierna parética puede tener problemas de espasticidad que deriven en un movimiento incontrolado como el clonus. Según estos autores, una posición de pedaleo vertical en lugar de una reclinada puede ser una solución adecuada.
Si bien la comunidad científica debate aún sobre las ventajas y desventajas de la movilización temprana en pacientes críticos y los efectos de la terapia física en la duración de la estancia en el hospital, la mortalidad, el periodo en que comienza a caminar, entre otros criterios, revisiones sistemáticas han evidenciado que la rehabilitación temprana es segura73, puede aumentar la fuerza muscular, incluyendo los músculos que favorecen la respiración; aumentando así, la probabilidad de volver a caminar sin asistencia74,75. Los sistemas de rehabilitación como THERA-trainer bemo y MOTOmed letto2 posibilitan el movimiento durante la realización de hemodiálisis76.
Según el estudio de los equipos mostrados en tabla 2, las tendencias en el diseño de dispositivos de pedaleo es potenciar el empoderamiento del paciente no solo en el centro de rehabilitación, sino también en el hogar. MyoCycle Home está diseñado para su uso en el hogar sin necesitar la guía de un especialista, aunque este siempre será una ayuda necesaria. Otro enfoque es posibilitar la terapia grupal. Este tipo de actividad física motiva más a los pacientes, promueve el contacto social y conduce a una participación activa y dinámica en la terapia. THERA-trainer permite realizar terapia grupal al posibilitar la conexión simultánea de varios de sus modelos con su software CL desde una computadora y la participación en minijuegos con niveles progresivos de dificultad. La técnica EEF ha sido integrada a la mayoría de los dispositivos analizados en la tabla 2
Los equipos restorative therapies (RT), MyoCycle y ERGYS incorporan la EEF, la cual puede estar activada o no. Aún así, MOTOmed u otros dispositivos permiten usar EEF como complemento adicional en la terapia, tal es el caso del modelo viva2. Esta técnica ha sido también utilizada en sistemas ICC77. Otra de las técnicas complementarias en las terapias de rehabilitación y que fueron utilizadas con la intención de mejorar el reconocimiento de patrones de IM de pedaleo fue la estimulación transcraneal con corriente directa (tDCS)6,51. La tDCS ha sido empleada para fomentar la plasticidad cerebral. La estimulación está basada en el suministro sobre la corteza cerebral de una corriente eléctrica directa o continua en el orden de los miliamperes y que circula desde el electrodo anódo hasta el catódo, con el objetivo de modular temporalmente la excitación cortical6. Sin embargo, aun las investigaciones en este campo no han arrojado resultados favorables (tabla 1).
Otra tendencia es la posibilidad de movimientos simultáneos para las bicicletas estacionarias que rehabilitan ambos miembros y la medición de variables dinámicas como el torque de un solo hemisferio en ambas extremidades. Este último factor ha sido una de las limitaciones de los sistemas de pedaleo en años anteriores3,78. En cuanto al uso de señales biomédicas como EMGs, son pocos los dispositivos que emplean algunas de sus aplicaciones, tal es el caso de la plataforma ERGYS que permite la obtención de biorretroalimentación electromiográfica en coordinación con la terapia de pedaleo, aunque este sistema es uno de los más caros en el mercado oscilando entre 18.000 y 20.000 USD. Entre los estudios analizados en la tabla 1, algunos incorporaban la EMGs como retroalimentación de la activación de los músculos durante la ejecución de movimiento de pedaleo y la verificación de que no hubiera actividad muscular en los miembros inferiores cuando se imaginaba el pedaleo59,60. En la búsqueda realizada se encontró la investigación de Cui et al.79 sobre un SIHR, que involucró activamente las señales de EMGs y EEG como entradas. Este artículo se enfocó en la rehabilitación de dos pacientes con LM. Se consideró que, para los pacientes sin fuerza muscular, determinada a partir de las señales mioélectricas y sensores de fuerza, se empleaba una ICC a partir de las señales de EEG para reconocer la intención del movimiento de pedaleo y controlar la velocidad del pedal motorizado. La ICC implementada se basó en la PSD de las bandas delta, theta, μ y beta y de la señal completa en el rango de 0,5 a 30Hz. Luego, indicadores cuantitativos fueron obtenidos a partir de los valores de PSD obtenidos y comparados con umbrales determinados, diferenciando así la intención del movimiento. Para pacientes con fuerza muscular, se combinó la ICC y un sensor de torque para realizar entrenamiento de asistencia y resistencia con la participación activa del paciente. Después de dos semanas de entrenamiento, ambos pacientes tuvieron efectos positivos en la rehabilitación.
Los pedales motorizados independientes resultan ser los más accesibles en cuanto a costo, y como se hizo referencia en el apartado anterior fueron los escogidos para implementar los sistemas ICC expuestos en la tabla 1. No se encontraron dispositivos comerciales que usaran estos nuevos enfoques en la neurorrehabilitación, tampoco de sistemas de IRH ra partir de señales de EMGs. Esto es debido a que aún los métodos estudiados presentan limitaciones y previendo el encarecimiento de los productos. Los estudios analizados en la tabla 1 utilizaron ergómetros de pedaleo, aunque estos requirieron de algunas transformaciones o adaptaciones al equipo para que se ajuste al protocolo experimental. Tales consideraciones pueden ser tenidas en cuenta en dispositivos encaminados a sistemas ICC. Una de las desavenencias es el empleo de cables para la adquisición de las señales, lo cual podría preverse debido al auge de la tecnología inalámbrica. Nakatani et al.54 sugirieron el uso de electrodos secos y de un electroencefalógrafo inalámbrico para obtener mediciones más estables y fáciles de realizar; investigaciones recientes han demostrado su utilidad clínica, portabilidad y preferencia por los pacientes y neurólogos80. La mayoría de los investigadores también requirieron de la medición en tiempo real de parámetros cinemáticos como la velocidad angular para marcar el inicio del pedaleo y de los periodos de descanso; para lo cual prefirieron el uso de sensores como las unidades de mediciones inerciales, muy utilizadas en la actualidad, y que permiten no solo la medición de velocidad angular, sino también de aceleración y campo magnético local6,56,81.
A partir de la revisión efectuada sería recomendable que en la fabricación de los próximos modelos comerciales se brinde la opción de utilizar señales de EMGs y EEG que permitan controlar pedales motorizados, y de esta forma se facilite el acople de sistemas IRH, en especial de las ICC.
ConclusionesLos estudios analizados presentan muchas evidencias de la aplicación de los movimientos cíclicos de pedaleo en la rehabilitación física de pacientes con enfermedades neurológicas y sus secuelas. Los modos pasivos, activos y asistidos contribuyen en las diferentes fases del proceso de rehabilitación a la recuperación parcial o permanente de las funcionalidades perdidas, y aunque diversos autores han comparado las terapias activas y pasivas, se ha demostrado que los movimientos pasivos son capaces de causar a nivel del SNC y de los músculos periféricos una mejora funcional comparable con las modalidades activas. La comunidad de ICC se encuentra también involucrada en la aplicación de los sistemas basados en inteligencia artificial para terapias de imaginación de movimiento, con el fin de estimular las regiones corticales motoras y facilitar la recuperación. Aunque existen dispositivos comerciales de pedaleo con grandes prestaciones y al nivel de las terapias probadas en la práctica clínica, aún deben evolucionar al uso de los sistemas ICC, sin desestimar los logros alcanzados.
FinanciaciónEste trabajo fue financiado por el Programa Territorial «Desarrollo de Productos y Servicios de Salud» (Código de Proyecto PT241SC003-013)
Conflicto de interésLos autores confirman que no existe ningún conflicto de intereses.
