












In an interconnected power system, low frequency electromechanical oscillations are initiated by normal small changes in system loads, and they become much worse following a large disturbance. Flexible AC Transmission System (FACTS) devices are widely recognized as powerful controllers for damping power system oscillations. The standard FACTS controllers are linear controllers which may not guarantee acceptable performance or stability in the event of a major disturbance. To overcome the drawbacks of conventional controllers, ANFIS (Adaptive Neuro-Fuzzy Inference System) control scheme has been developed in this paper, and it has been applied for the external coordinated control of series connected FACTS controllers known as Static Synchronous Series Compensators (SSSCs) employed in a two-area power system. In neuro-fuzzy control method, the simplicity of fuzzy systems and the ability of training in neural networks have been combined. The training data set the parameters of membership functions in fuzzy controller. This ANFIS can track the given input-output data in order to conform to the desired controller. Simulation studies carried out in MATLAB/SIMULINK environment demonstrate that the proposed ANFIS based SSSC controller shows the improved damping performance as compared to conventional SSSC based damping controllers under different operating conditions.
With increasing power transfer and heavier loading, power systems become gradually more complex to operate and they may become less secure for riding out major power outages [1, 2]. As a result, large power flows with inadequate control may be observed and excessive reactive power and large dynamic swings may be experienced in different parts of the system which will prevent the transmission interconnections from being fully utilized.
Power system exhibits various modes of oscillations due to interaction among various components. Most of the oscillations are due to synchronous generator rotors swinging relative to each other. Stressed power systems are known to exhibit nonlinear behavior. Load changes or faults are the main causes of power oscillations. If the oscillations are not controlled properly, it may lead to a total or partial system outage. If no adequate damping is available, these oscillations may sustain and grow to cause system separation [3].
In the past three decades, power system stabilizers (PSSs) have been extensively used to increase the system damping for low frequency oscillations. The power utilities worldwide are currently implementing PSSs as effective excitation controllers to enhance the system stability [4]–[6]. However, there have been problems experienced with PSSs over the years of operation. Some of these were due to the limited capability of PSSs in damping only local and not inter-area modes of oscillations. In addition, PSSs can cause great variations in the voltage profile under severe disturbances and they may even result in leading power factor operation and losing system stability. This situation has necessitated a review of the traditional power system concepts and practices to achieve a larger stability margin, greater operating flexibility, and better utilization of existing power systems.
In recent years, the concept of flexible ac transmission systems (FACTS) brought radical changes in the power system operation and control. The FACTS devices linked to the improvements in semiconductor technology opened new opportunities for controlling power and enhancing the usable capacity of existing transmission lines. As supplementary functions, damping the inter-area modes and enhancing power system stability using FACTS controllers have been extensively studied and investigated. In these years, Voltage Source Converter (VSC)-based series connected FACTS controllers, known as the new FACTS generation, which can inject a voltage with controllable magnitude and phase angle at the fundamental frequency, are found to be more capable of handling power flow control, transient stability and oscillation damping enhancement. In a recent literature [7], a novel methodology for tuning static synchronous compensator (STATCOM) based damping controller in order to enhance the damping of system low frequency oscillations has been described. This paper investigates the damping capabilities of static synchronous series compensator (SSSC), which is one of the VSC-based series connected FACTS controllers. SSSC is a solid-state controllable voltage source inverter that is connected in series with power transmission lines. With the injected voltage in quadrature with the line current and the capability of dynamically changing its reactance characteristic from capacitive to inductive, SSSC becomes an effective tool for power flow control [8]. In addition, an auxiliary stabilizing signal can be superimposed on its power flow control function to improve power system oscillation stability [9].
An attempt has been made to apply hybrid neuro-fuzzy approach for the coordination between the conventional power oscillation damping (POD) controllers for multimachine power systems. With the help of MATLAB, a class of adaptive networks, that are functionally equivalent to fuzzy inference systems, is proposed. The proposed architecture is referred to as ANFIS (Adaptive Neuro-Fuzzy Inference System) [10]–[14]. In this paper, ANFIS based SSSC controllers are developed where each controller uses the speed of a synchronous machine and its derivative as the inputs. The ANFIS based SSSC controller uses a first-order Sugeno-type fuzzy logic controller whose membership functions and consequences are tuned by backpropagation method. Fuzzy rules and membership functions of the controller can be tuned automatically by learning algorithm. The proposed technique is illustrated on a 3-machine, 9-bus power system. MATLAB/SIMULINK and fuzzy logic toolbox have been used for system simulation. The results demonstrate that the proposed self-learning ANFIS based SSSC controller provides a good damping performance over a wide range of operating conditions as compared to conventional SSSC based damping controllers.
This paper is organized as follows. The single-machine infinite-bus (SMIB) and multimachine power system models are described in Section 2. The design aspects of conventional SSSC based damping controller and fuzzy logic coordinated SSSC based damping controller, and the concept of ANFIS control scheme are discussed in Section 3. Simulation results and discussions are illustrated in Section 4. Some conclusions are given in Section 5.
2Power system modelThe recommended state space model for SSSC to study dynamic stability of a single-machine infinite-bus power system (SMIB) is given by Eqn. (1)[15].
where, Kvu=KAKVMTA,Kqu=KqmT′do,Kpu=KpmM,Δu=Δm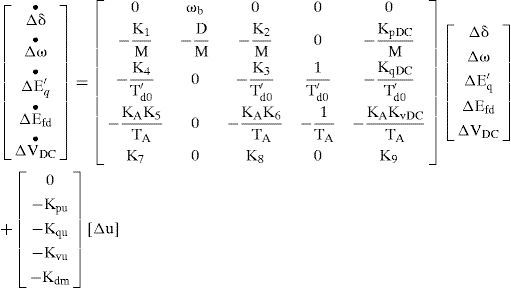
In the above equations, the output signal is assumed to be the active power delivered along the line, so that [Δy]=[ΔPe]. Open-loop eigen values can be calculated using the state matrix of Eqn. (1). The characteristics of the SSSC installed in an n-machine power system are the same as the case of SMIB system. The Phillips-Heffron model for this system is derived from the following linearized equations [15, 16]:
where the variables are n-order vectors and the matrices are n-order diagonal matrices. Using the above differential equations, the Phillips-Heffron model for an n-machine power system can be expressed. It should be noticed that in this case, the K-coefficients are n-order vectors [9, 16]. In this paper, a 3-machine 9-bus power system model as shown in Figure 1 is used to examine inter-area oscillation control problem. In Figure 1, the generator G1 is considered as reference bus. This two-area system, where Area 1 consists of generator G2 and Area 2 consists of generator G3, is created especially for the analysis and study of the inter-area oscillation problem [17]. The base MVA is 100 and the system frequency is 50Hz.



There are two conventional SSSC based damping controllers in the system; one installed between bus 5 and bus 7, and another between bus 6 and bus 9 respectively. The system data are given in Appendix.
3Design methodologyIn this section, the design aspects of conventional SSSC based damping controller, fuzzy coordinated SSSC controller and ANFIS control scheme are described.
3.1Design of damping controllerThe damping controller is designed to improve the damping torque. The structure of an SSSC based damping controller [15] is shown in Figure 2. It consists of gain, signal wash-out and phase compensator blocks. The block of signal wash-out is a high pass filter that modifies the SSSC input signal and prevents steady changes in active power. Therefore, TW should have a large value to allow signals associated with active power oscillations to pass unchanged. The value of TW is not critical and may be in the range of 1 to 20 seconds. Here it is assumed to be equal to 3 seconds.
3.2Design of fuzzy logic coordinated damping controller
Most of the FACTS based damping controllers belong to the PI (Proportional + Integral) type and work effectively in single machine system [18]. However, the performance of the above mentioned damping controllers deteriorates in multimachine power systems. The damping performance of the FACTS based damping controllers in multimachine power systems can be improved by using fuzzy coordinated design [19]. The structure of the proposed fuzzy coordination controller is shown in Figure 3, where the inputs are speed deviation of synchronous machines and their acceleration. Thus, the conventional damping controllers are tuned by using fuzzy logic controllers.

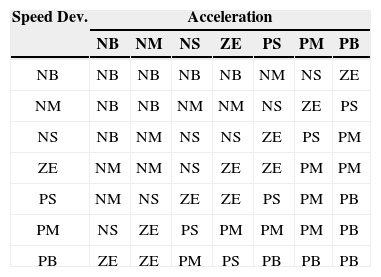
The fuzzy logic controller [20] comprises of four stages: fuzzification, a knowledge base, decision making and defuzzification. The fuzzification interface converts input data into suitable linguistic values that can be viewed as label fuzzy sets. In this paper, the inputs are fuzzified into seven fuzzy sets: Positive Big (PB), Positive Medium (PM), Positive Small (PS), Zero (ZE), Negative Small (NS), Negative Medium (NM) and Negative Big (NB) as shown in Figure 4. The knowledge base comprises knowledge of application domain and attendant control goals by means of set of linguistic control rules. The decision making is the aggregation of output of various control rules that simulate the capability of human decision making. In this paper, the rules are trained using ANFIS technology. Table 1 shows the rule base of the fuzzy logic controller. To obtain a deterministic control action, a defuzzification strategy is required. Defuzzification is a mapping from a space of fuzzy control actions defined over an output universe of discourse into a space of non-fuzzy (crisp) control actions. There are different techniques for defuzzification of fuzzy quantities such as Maximum method, Height method, and Centroid method. Here, Centroid method is used for defuzzification.
3.3ANFIS control scheme for SSSC
The proposed ANFIS controller also uses seven linguistic variables such as: Positive Big (PB), Positive Medium (PM), Positive Small (PS), Zero (ZE), Negative Small (NS), Negative Medium (NM) and Negative Big (NB). The membership functions are chosen to be Gaussian as shown in Figure 4. The defuzzification of the variables into crisp outputs is tested by using the weighted average method.
In MATLAB, the ANFIS editor graphics user interface is available in Fuzzy Logic Toolbox [13]. Using a given input/output data set, the toolbox constructs a fuzzy inference system (FIS) whose membership function parameters are adjusted using either a backpropagation algorithm alone, or in combination with a least squares type of method. This allows the fuzzy systems to learn from the data they are modeling. For the backpropagation-based neuro-fuzzy approach, it includes the Sugeno's model with the following format:
If the speed deviation error is Δω and the acceleration is Δω•, then
where, i={1, n*m} refers to the rule numbers; j={1, n} refers to the speed deviation error terms in the fuzzy set; n, m refers to the number of terms generated; k={1, m} refers to the acceleration terms in the fuzzy set; {pi,qi,ri} are the ith consequent (SSSC output) parameters.
The input signals to the ANFIS controller for SSSC are Δω and Δω•. In the ANFIS editor, the fuzzy inference can be generated using two partition methods; grid partitioning and subtractive clustering. Here, grid partitioning method is used. For grid partitioning, it uses the Fuzzy C-means (FCM) clustering data clustering technique. FCM is a data clustering algorithm in which each data point belongs to a cluster with a degree specified by a membership grade.
After generating the fuzzy inference, the generated information describing the model's structure and parameters of both the input and output variables are used in the ANFIS training phase. This information will be fine-tuned by applying the hybrid learning or the backpropagation schemes. The generated model is of a first-order Sugeno's form and the generated rules are in the form described in Eqn. (6). After this stage, the membership functions will be adjusted to optimize the controller action.
4Simulation results and discussionThe robustness of the proposed ANFIS based SSSC controllers to improve the stability of multimachine power systems is checked by considering the 3-machine 9-bus power system model shown in Figure 1. The generator G1 is considered as reference bus. Each machine of this power system has been represented by a fourth order two-axis nonlinear model. Details of the system data [21, 22] are given in Appendix. To evaluate the performance of the proposed controller, the system response is compared with conventional SSSC based damping (lag-lead) controller. The comparison is carried out under two different kinds of operating points: (i). Total real power of load P=0.7p.u, Total reactive power of load Q=0.8p.u, Terminal voltage Vt=1.05p.u, and (ii). Total real power of load P=0.8p.u, Total reactive power of load Q=0.9p.u, Terminal voltage Vt=1.05p.u, and power disturbances. Here, for illustration, the first set of operating point is considered. With conventional SSSC based damping (lag-lead) controllers, one installed between bus 5 and bus 7 and another between bus 6 and bus 9 respectively, the system response curves due to a power (or torque) disturbance of ΔTm=0.01p.u and disturbance clearing time of 50 seconds are shown in Figures 5–10. From these Figures, it is observed that the system damping in Area 1 and Area 2 is poor and the system is highly oscillatory. Therefore, it is necessary to install ANFIS based SSSC controllers in order to have good damping performance. The fuzzy rules are trained using ANFIS technology.
")
")
")
")
")
")
From the Figures 5–10, it is inferred that the ANFIS based SSSC controller can provide better damping of the speed deviation, power angle, and real power oscillations than the conventional SSSC based damping controller. The adaptive neuro-fuzzy based SSSC controller is able to track the system operating conditions, and thus as seen from the results shown in Figures 5–10, it is able to adjust and provide a uniformly good performance over a wide range of operating conditions and disturbances.
5ConclusionTo improve the performance of conventional SSSC based damping controllers, ANFIS technology has been employed in this paper. The fuzzy rules are trained using this technology. The proposed method has been evaluated on a 3-machine 9-bus power system. From the simulation results, it is understood that the ANFIS based SSSC controllers can provide better damping of the speed deviation, power angle and real power oscillations in terms of reduced settling times than the conventional SSSC based damping controllers under different operating conditions. The ANFIS control scheme is easy to tune and quite robust. Also such a nonlinear adaptive SSSC controller will yield better and fast damping under small and large disturbances even with changes in system operating conditions.
(1). Reduced Y-bus Matrix:

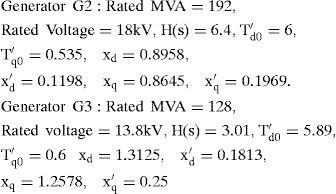
(2). Generators' data:
(3). Exciter data:

(4). SSSC damping controller data:
Saturation: Upper limit=0.05, Lower limit=−0.05.
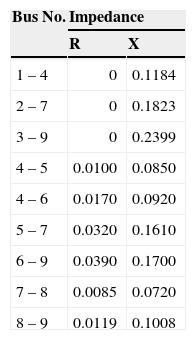
(5). Transmission line data:
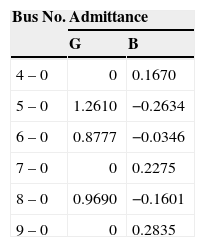
(6). Shunt admittances data:
Note: All impedance and admittance values are in per unit on 100MVA base. All time constants are in seconds.