






El campo de la cirugía laparoscópica ha experimentado un crecimiento exponencial en los últimos años. A pesar de los grandes avances en este campo, las herramientas laparoscópicas estándar no han logrado su desarrollo óptimo, presentando ciertas deficiencias en lo que a movilidad y ergonomía se refiere.
La cirugía robótica ha intentado aportar soluciones a estos problemas, sin embargo, existen inconvenientes, entre los que se encuentran su elevado coste, escasa disponibilidad y la necesidad de capacitación específica, lo que condiciona su rentabilidad y generalización de uso.
Presentamos los resultados de una serie clínica prospectiva de 20 casos, en los que se ha testado la seguridad, eficacia y ergonomía de FlexDex® para la realización de suturas intracorpóreas laparoscópicas. El resultado muestra una herramienta segura y funcional que ofrece control y precisión en su manejo, además de mejorar la ergonomía del cirujano. Este dispositivo supone una alternativa que combina la precisión y el rango de movimientos de la cirugía robótica, con la mayor disponibilidad de la laparoscopia convencional.
The field of laparoscopic surgery has experienced an exponential growth in recent years. Despite great progress in this field, standard laparoscopic tools have not been optimally developed and still has some deficiencies when it comes to mobility and ergonomics.
Robotic surgery has attempted to solve these problems by improving the articulation of surgical instruments. However, it presents a series of disadvantages, among which are its high cost, low availability and the need of a specific training, which conditions its profitability and hinders a widespread use.
We present the results of a prospective clinical series of 20 cases in which the safety, efficacy and ergonomics of FlexDex® have been tested for performing laparoscopic intracorporeal sutures. The result is a safe and functional tool that offers both control and precision in its handling, while improves the ergonomics of the surgeon. This device represents an alternative that combines the precision and range of movements of robotic surgery with the greater availability of conventional laparoscopy.
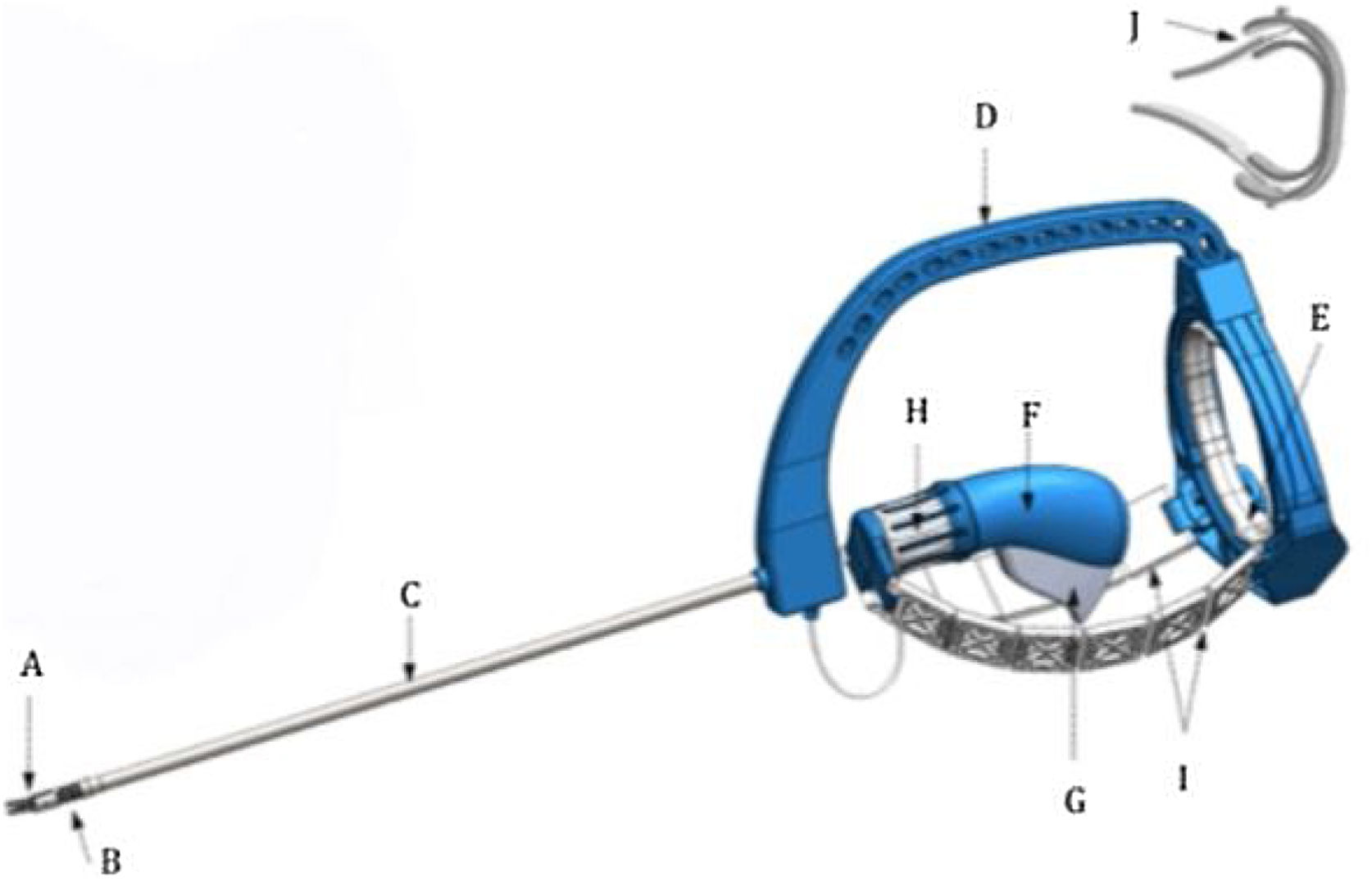
Debido a los avances en cirugía laparoscópica durante los últimos años, tanto en técnicas como en material de instrumentación, han surgido diferentes campos de innovación, destacando entre ellos la cirugía robótica. Si bien mejorar la funcionalidad es un objetivo común, lograrlo sin aumentar significativamente el coste sigue suponiendo un desafío. En este contexto surge una nueva herramienta, el brazo mecanizado FlexDex® (FlexDex Surgical®, Brighton, Michigan, EE. UU.) (fig. 1), que combina la precisión y el rango de movimientos de la cirugía robótica con una mayor accesibilidad.
: Mandíbula. B): Punta articulada. C): Eje. D): Marco. E): Gimbal de tres ejes. F): Mango. G): Palanca de la manija. H): Disco de rotación. I): Tiras de flexión. J): Muñequera.")
El objetivo primario de este estudio ha sido evaluar la seguridad del dispositivo FlexDex®, y sus objetivos secundarios, la comprobación de su eficacia y ergonomía. Para ello se efectuaron una serie de procedimientos quirúrgicos con realización de suturas laparoscópicas progresivamente más complejas.
Técnica quirúrgicaPresentamos una serie prospectiva de 20 procedimientos laparoscópicos que demuestran la experiencia inicial en nuestro entorno con el brazo mecanizado FlexDex® para la realización de diferentes técnicas quirúrgicas que requieren sutura manual. El estudio se realizó en dos fases clínicas de creciente dificultad técnica y un entrenamiento previo en quirófano experimental. Inicialmente se realizaron 10 funduplicaturas tipo Nissen, para posteriormente usar el dispositivo en procedimientos más complejos: cuatro hernioplastias TAPP, cuatro rectosacropexias y dos refuerzos de anastomosis colorrectal.
En todos los procedimientos, se empleó visión tridimensional (3D de Karl Storz) y óptica de 30°, que consideramos indispensables para la adecuada ejecución de los procedimientos con uso de FlexDex®. Todas las intervenciones fueron realizadas por dos cirujanos expertos en cirugía mínimamente invasiva. Según el tipo de procedimiento realizado, se utilizó el brazo robótico con un propósito y una localización diferente. Para la funduplicatura Nissen, se empleó en la sutura de los pilares y la creación de la funduplicatura, en el TAPP para el anclaje de la prótesis y cierre peritoneal, en la rectosacropexia para la fijación de la prótesis al recto y promontorio, y en anastomosis colorrectales de riesgo para la sutura de refuerzo anastomótico.
Para la exposición de la técnica quirúrgica y particularidades de uso de FlexDex® utilizaremos el modelo de la funduplicatura tipo Nissen, al tratarse de la serie más amplia y sobre la que se realizaron los 10 primeros casos.
Tras la inducción anestésica y el posicionamiento del paciente con las piernas descendidas, se coloca un trócar óptico de 12 mm a nivel umbilical, un trócar de 11 mm en posición pararrectal izquierda para FlexDex® y la introducción y retirada de agujas y tres trócares de 5 mm a nivel pararrectal derecho, subxifoideo y en línea axilar anterior izquierda. Resultó necesario separar el trócar por el que se realizaba la introducción de FlexDex®, al menos 8 cm del trócar óptico y del asistente, evitando así posiciones forzadas y optimizando la ergonomía del operador. Este distanciamiento entre trócares es necesario para prevenir conflictos de espacio al girar el arco del dispositivo. Es importante destacar que cuando se introduce la sutura en el abdomen se precisa el acompañamiento de la punta del dispositivo con la mano izquierda durante su introducción en el trócar.
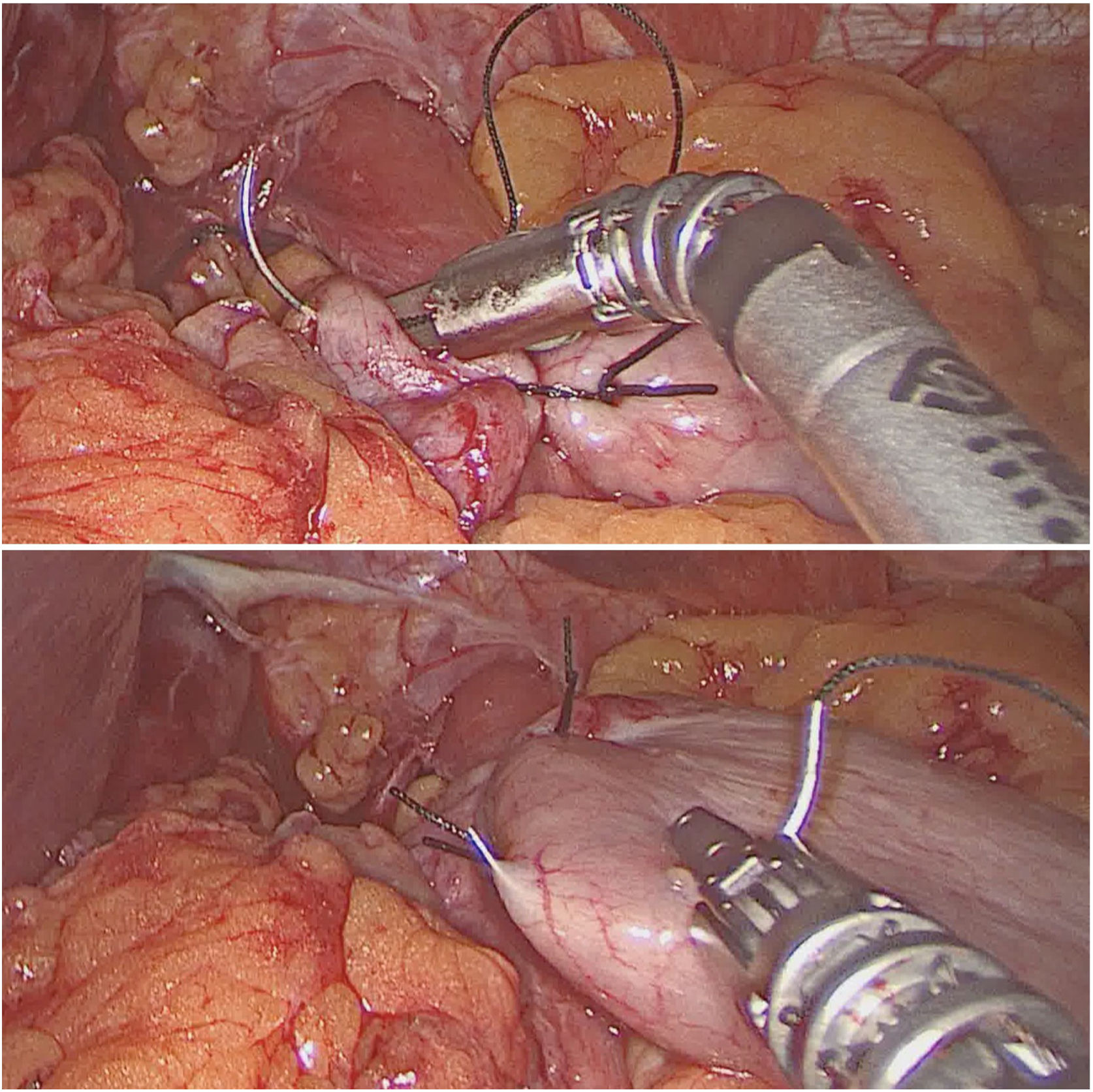
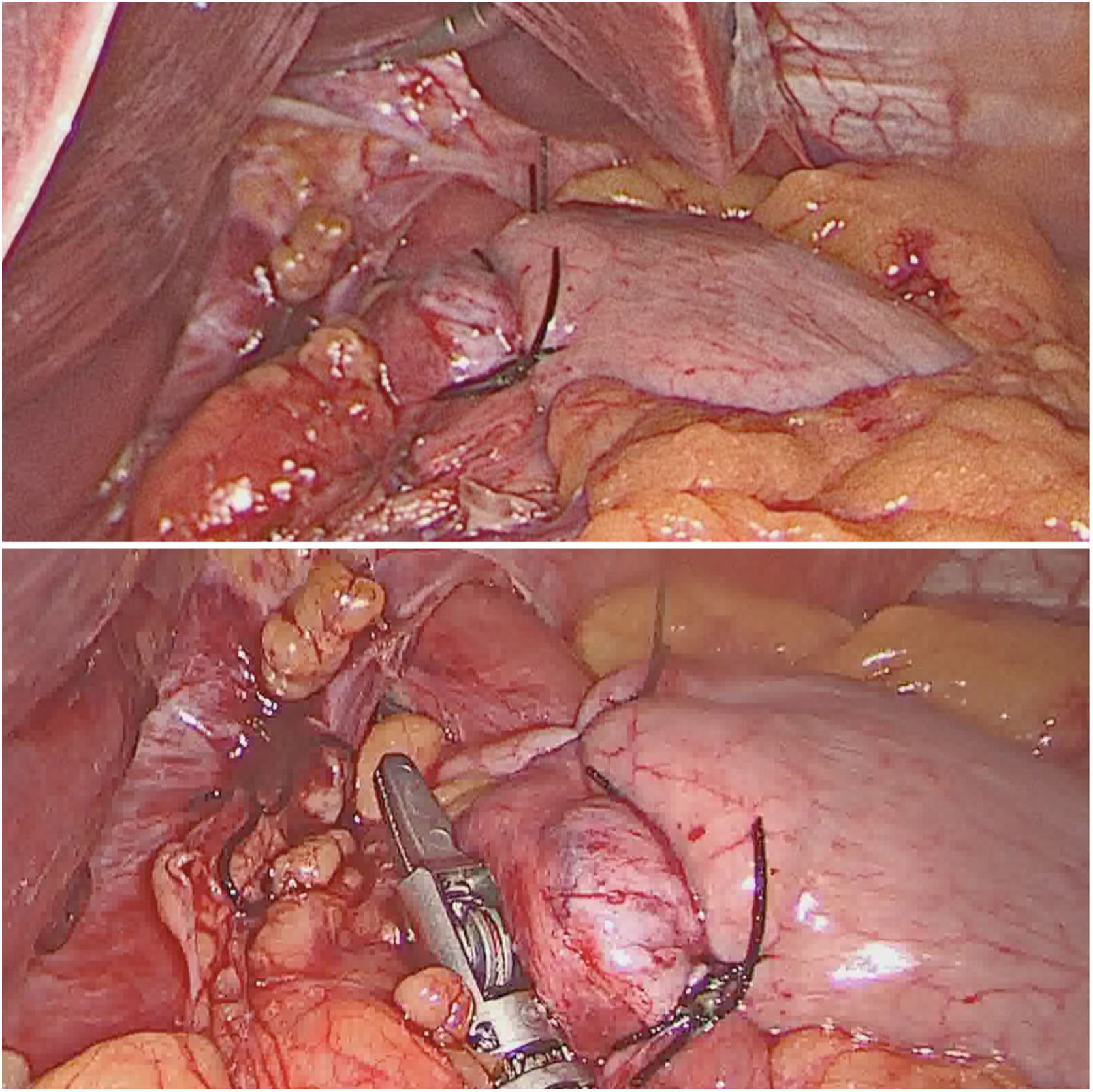
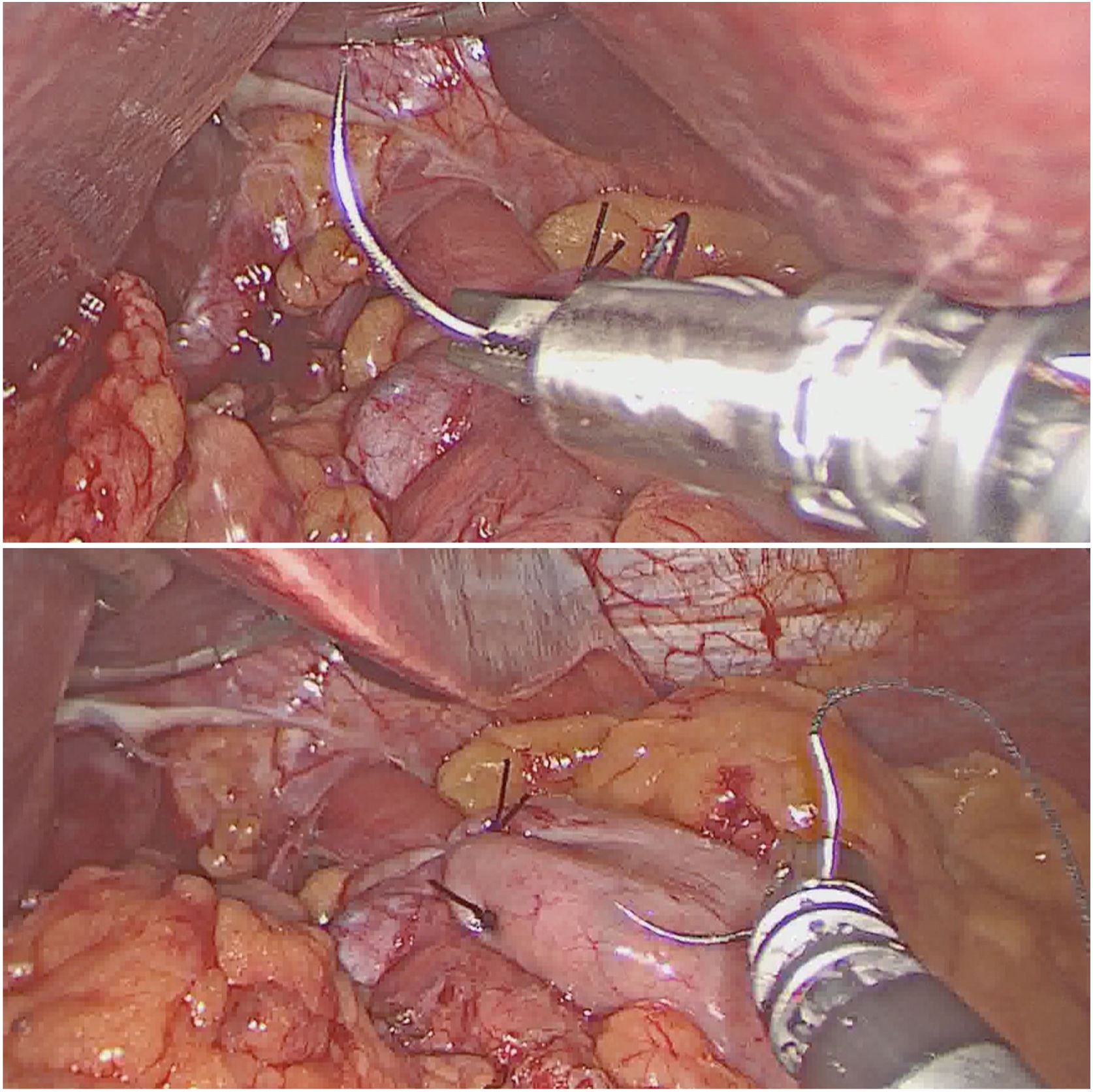
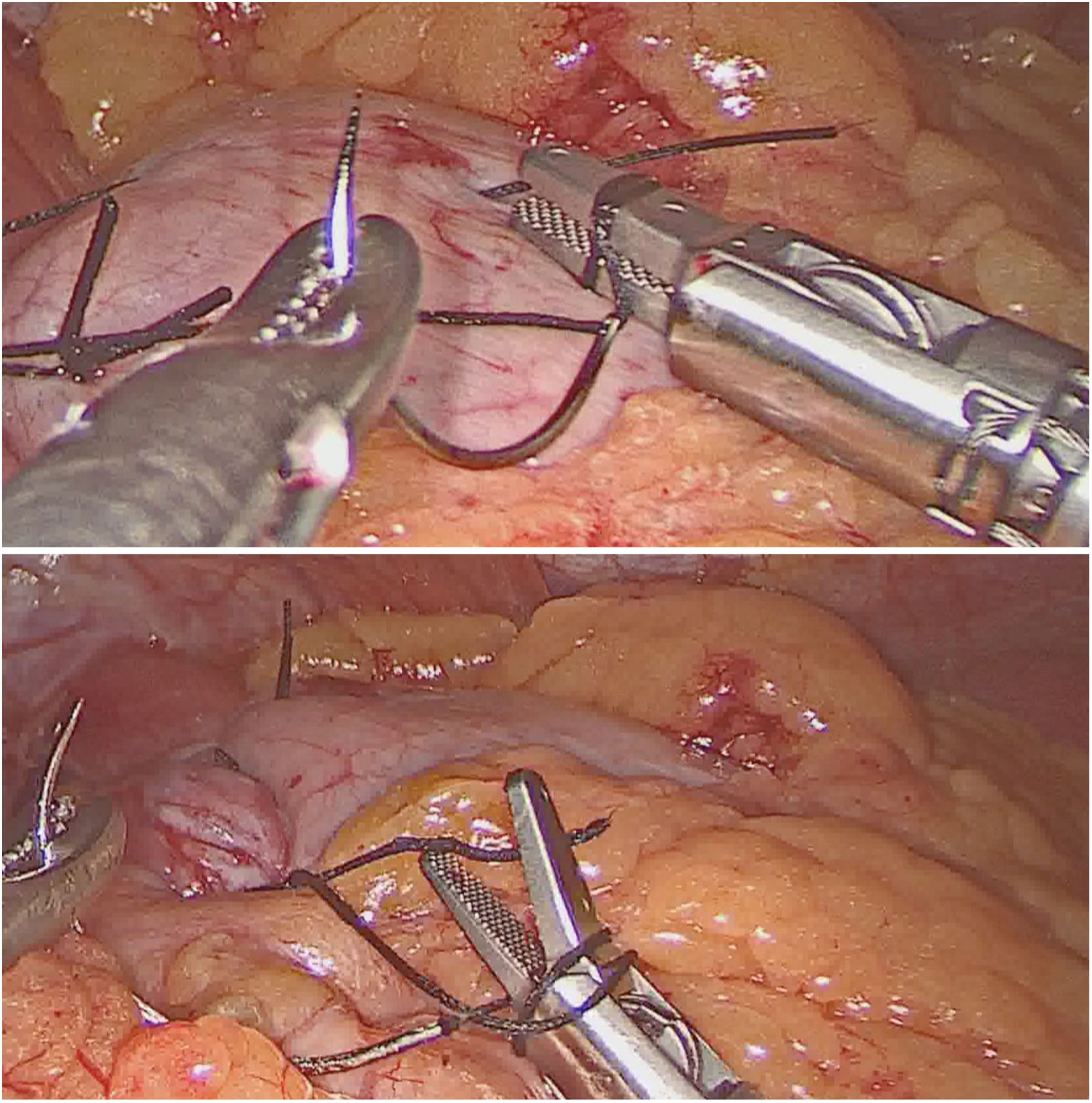
La cirugía antirreflujo se realizó según la técnica de Nissen, realizando hiatorrafia tras una amplia disección esofágica y en la que se introdujo el uso del instrumento FlexDex® para la realización de las suturas de seda 2-0 en la parte inferior del hiato, una sutura supraesofágica y tres suturas interrumpidas (fig. 2) para crear la funduplicatura, respetando una distancia de aproximadamente 1 cm entre ellas (fig. 3). Se realizó la sutura quirúrgica consiguiendo un correcto posicionamiento, tanto del portagujas como de la aguja (fig. 4). Así mismo, se facilitó el anudado intracorpóreo gracias a la articulación de la parte distal del portagujas, evitando al máximo la tracción tisular (fig. 5).




Para evaluar esta tecnología, se hizo uso de una escala analógica visual (EVA), en la que los cirujanos participantes realizaban una evaluación subjetiva e inmediatamente posterior a su uso, valorando del uno al 10 la seguridad, eficacia y ergonomía de la herramienta. Se obtuvieron unos valores en rango con media de seis a siete durante el período de entrenamiento, que se trasladaron a valores de nueve a 10 en el uso clínico del instrumento, destacando en su evaluación que FlexDex® permitió la ejecución de suturas y nudos con un esfuerzo considerablemente menor al realizado mediante la técnica laparoscópica convencional, mejorando la ergonomía y eficiencia del operador.
DiscusiónLa difusión de la cirugía mínimamente invasiva ha prosperado en los últimos años, proporcionando múltiples ventajas1: incisiones más pequeñas, estancias hospitalarias más cortas, disminución del dolor postoperatorio y recuperación más rápida del paciente2. Sin embargo, las técnicas laparoscopias se asocian con varios desafíos técnicos, como son el movimiento restringido de los instrumentos laparoscópicos rectos, la visión bidimensional y la mala ergonomía para el cirujano2.
Una de las mejoras más efectivas en el campo de la cirugía mínimamente invasiva fue la implementación de sistemas robóticos. El sistema Da Vinci® (Intuitive Surgical, Sunnyvale, California, EE. UU.), permitió a los cirujanos operar con mayor precisión, rango de movimiento, ergonomía y comodidad3. No obstante, también presenta una serie de inconvenientes, como la falta de percepción háptica para el cirujano sobre los tejidos4 o la limitada accesibilidad y maniobrabilidad en la cavidad abdominal debido al tamaño de los brazos robóticos5. Actualmente, el sistema Da Vinci® es la única plataforma quirúrgica robótica disponible en el mercado, que permite la telemanipulación en cirugía mínimamente invasiva. Esta tecnología presenta un coste significativo6, lo que explicaría que todavía no se haya generalizado su uso7.
Desde la primera colecistectomía laparoscópica, en 1985, apenas ha habido avances en el instrumental laparoscópico. Las herramientas de uso estándar no logran optimizar la movilidad en espacios limitados3. El sistema FlexDex® es una tecnología desarrollada en los tres ejes e integrada en un instrumento laparoscópico convencional, que transmite los movimientos de la mano, la muñeca y el brazo del cirujano desde el exterior del paciente a un efector final dentro del cuerpo del paciente (fig. 6). Su mayor accesibilidad permite realizar suturas en áreas de difícil acceso donde la movilidad con instrumentos laparoscópicos convencionales no es óptima, como en el caso de la pelvis y el hiato, permitiendo minimizar los gestos forzados en la mano del cirujano, gracias a la transmisión de una amplia libertad de movimientos a la punta del dispositivo (fig. 7).


Al igual que durante los inicios de la laparoscopia convencional, el esfuerzo del operador resultará esencial para optimizar el potencial de FlexDex® y facilitar su incorporación3. En este caso, la principal dificultad es la necesidad de coordinar los movimientos de la mano izquierda (que manejará un instrumento de laparoscopia estándar), con los de la mano derecha, cuyos movimientos se transmiten de manera inversa a la laparoscopia convencional al usar FlexDex®.
En el año 2017, Criss et al.3 publicaron la primera experiencia en el uso de FlexDex® realizando una reintervención de una funduplicatura de Nissen laparoscópica. Concluyeron que la utilización de FlexDex® había mejorado el control operativo del cirujano dentro de un espacio reducido, permitiendo anudar intracorpóreamente con un esfuerzo considerablemente menor. Posteriormente han sido escasos los estudios sobre la tecnología y uso de FlexDex®. Destaca el estudio de simulación prospectivo llevado a cabo por Criss et al. en 20198, donde se evaluó la ergonomía, dificultad de uso y rendimiento de FlexDex® en diferentes grupos que utilizaban este instrumento por primera vez. Los usuarios que operaron con FlexDex® mejoraron la ergonomía y las suturas intracorpóreas fueron más efectivas en localizaciones de difícil acceso.
En nuestro caso, la evaluación del instrumento fue realizada por dos cirujanos expertos en cirugía laparoscópica y que habían realizado un entrenamiento en pelvi-trainer y modelo porcino animal durante un total de 10 horas. Consideramos que previamente al manejo de FlexDex®, el operador debe estar formado en cirugía laparoscópica y poseer un dominio completo de la sutura intracorpórea.
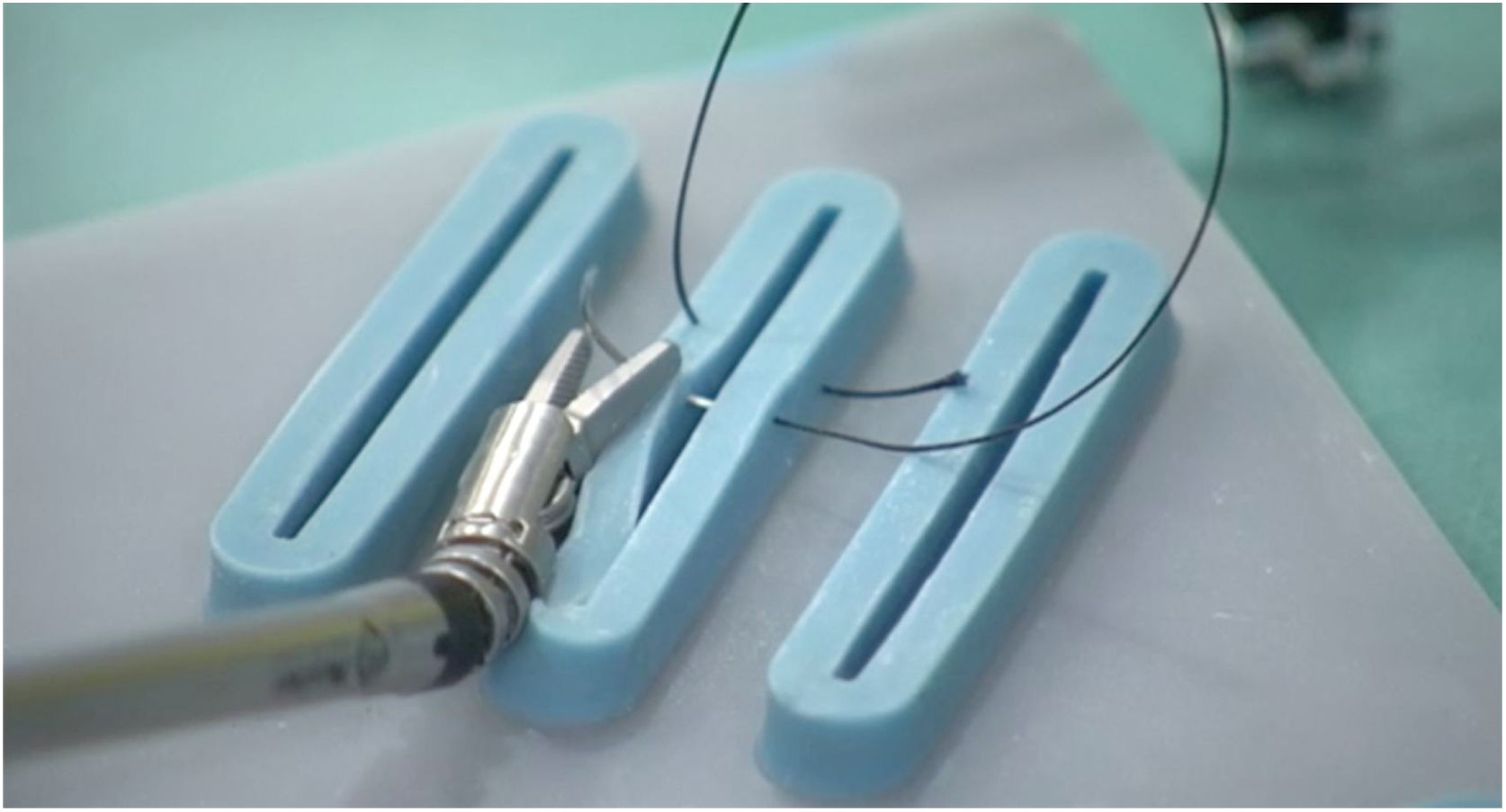
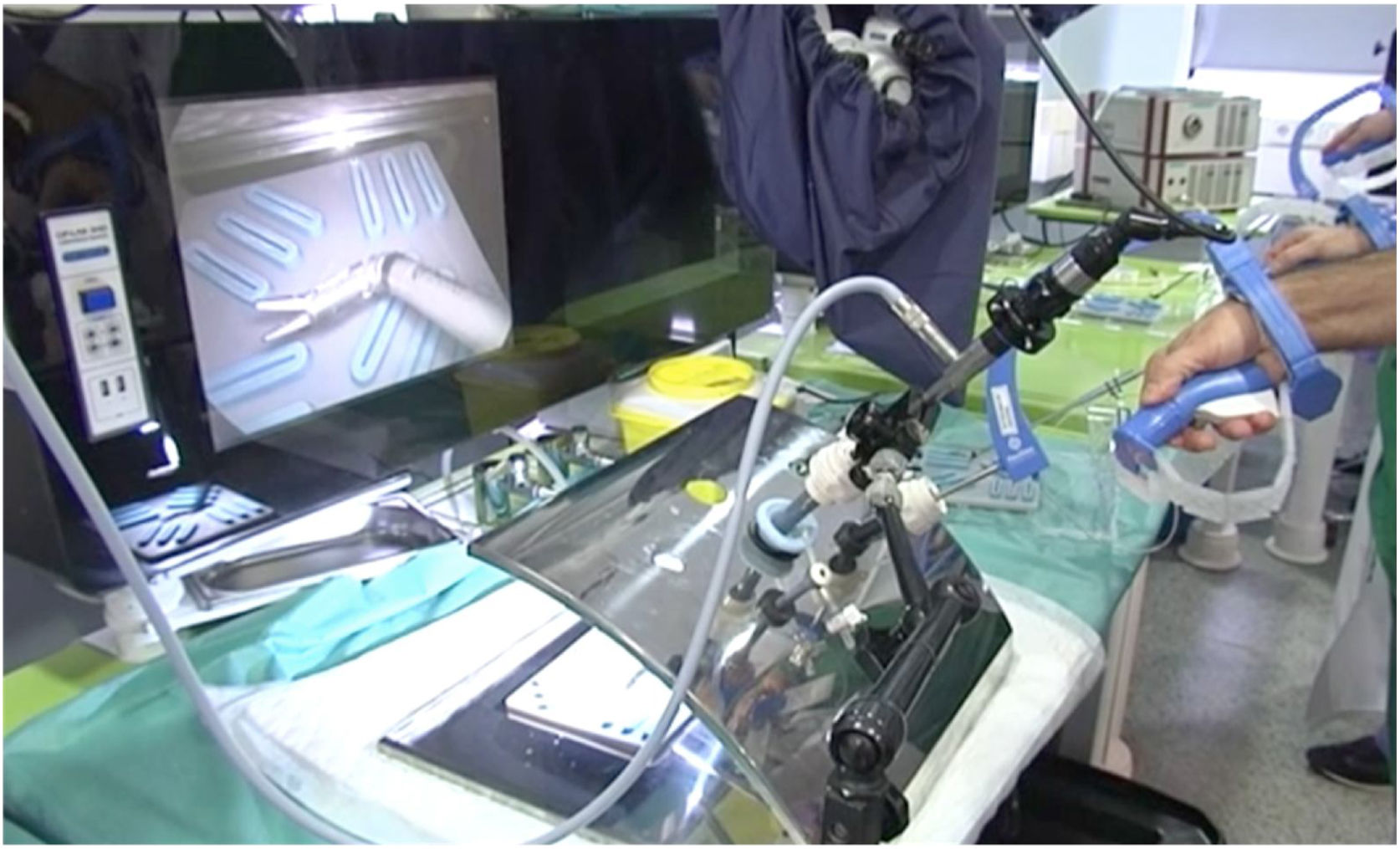
Además, recomendamos realizar una aproximación secuencial al manejo del instrumento iniciando la simulación en pelvi-trainer o maqueta (fig. 8), continuando con tejido orgánico y modelo animal vivo (de disponerse del mismo), hasta conseguir una adecuada coordinación mano derecha-mano izquierda. Una vez se alcance este objetivo, se obtendrá una rentabilidad máxima del dispositivo. Sin embargo, para los cirujanos que no hayan realizado un período de entrenamiento previo, no parece prudente hacer uso clínico de esta herramienta, ya que podría resultar en un aumento del tiempo quirúrgico y un posible menoscabo en la seguridad del paciente.

En ninguno de los casos se dieron complicaciones intraoperatorias, patentando el objetivo primario del estudio en cuanto a la seguridad. Dado que estos 20 casos suponen una experiencia inicial en el uso de FlexDex®, la adaptación a la herramienta podría haber comprometido el tiempo quirúrgico, sin embargo, no se produjo un aumento en el mismo.
Ante estos resultados, se prevé que FlexDex® pueda evolucionar para convertirse en una opción funcional, pero asequible económicamente, sobre todo en aquellos centros sin posibilidad de acceso a cirugía robótica. A nuestro entender, podría proporcionar una excelente alternativa a los sistemas robóticos en procedimientos quirúrgicos complejos, ofreciendo a los cirujanos la precisión y el control que desean, mientras mantienen el equilibrio de coste, resultado y beneficio para el paciente. Además, su portagujas actual abre la puerta a la adición de una amplia gama de terminales que permitan emplear un disector, una tijera o aplicar energía bien asociada a estos terminales, o bien en forma de selladores tisulares.
FinanciaciónEste trabajo no ha recibido ningún tipo de financiación.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.

