

La plastia ureteropiélica ha sido descrita por diferentes autores y llevada a mínima invasión por laparoscopia hasta convertirla en el gold standard del procedimiento. Los resultados de la plastia ureteropiélica en la actualidad son similares a la técnica abierta, sin embargo, el desarrollo de la técnica por laparoscopia requiere de mucha más experiencia y habilidad. Cuando se tiene la posibilidad de ofrecer la resolución con cirugía asistida con robot, se tiene el potencial de resolver por mínima invasión con mayor facilidad en la manipulación de la sutura intracorpórea, así como combinar con cistoscopia transtrocar para la litolapaxia de litiasis asociada.
Material y métodosSe trata de un varón de 32 años con cuadro de dolor lumbar izquierdo tipo cólico de moderada intensidad, con síntomas urinarios asociados, con Giordano positivo. Se protocoliza dolor y se encuentra estenosis de la unión ureteropiélica en estudio de tomografía abdominopélvica más litiasis piélica de 1.3cm.
DiscusiónSe ha reportado la plastia ureteropiélica asistida con robot desde el año 2002 por Gettman con tasas de éxito similares a las de otras técnicas.
ConclusionesOfrecer plastia ureteropiélica asistida con robot es una alternativa, con buena resolución técnica del defecto con la sutura y reparación, además de hacer cirugía híbrida al combinar endoscopia transtrocar para realizar litolapaxia de la pelvis renal o de las cavidades renales de manera simultánea.
Pyeloplasty has been described by different authors and taken into minimally invasive surgery through laparoscopy, becoming the criterion standard of the procedure. Today its laparoscopic results are similar to those with the open technique, but the former requires much more experience and skill. When performed through robotic-assisted surgery, this minimally invasive procedure has the potential to more easily manipulate intracorporeal suturing and combine trans-trocar cystoscopy for litholapaxy.
Materials and methodsA 32-year-old man presented with colicky, left lumbar pain of moderate intensity with associated urinary symptoms and positive costovertebral angle percussion. An abdominopelvic tomography scan revealed ureteropelvic junction stricture and a pelvic stone measuring 1.3cm.
DiscussionRobotic-assisted pyeloplasty was first described in 2002 by Gettman and its success rates are similar to those of other techniques.
ConclusionsRobotic-assisted pyeloplasty is a good alternative technique for defect suturing and repair. It can also be a hybrid surgery through its combination with trans-trocar endoscopy to simultaneously perform litholapaxy of the renal pelvis or renal cavities.
La plastia ureteropiélica ha sido descrita por diferentes autores y es realizada con éxito por laparoscopia al grado de ser el gold standard del procedimiento1. Los resultados de la plastia ureteropiélica en la actualidad son similares a la técnica abierta, sin embargo, el desarrollo de la técnica por laparoscopia requiere de mucha más experiencia y habilidad2. La cirugía de mínima invasión ha tenido como objeto ofrecer menor morbilidad y una recuperación más rápida que la cirugía abierta, y se tienen diferentes opciones como la endopielolitotomía, la plastia laparoscópica y la plastia asistida con robot1,3.
En el año 2002 se describió por primera vez la plastia desmembrada asistida con robot por Gettman con técnica de Anderson-Hynes: se decribió así el inicio del procedimiento por esta vía4.
Desde el inicio de la cirugía robótica en la Ciudad de México5 se ha logrado realizar cada vez una mayor diversidad de procedimientos laparoscópicos asistidos con robot. Existe la posibilidad de ofrecer la plastia ureteropiélica asistida con robot, con la que se tiene el potencial de resolver por mínima invasión, con mayor facilidad en la manipulación de la sutura intracorpórea gracias a la magnificación de la visión, la vista tridimensional, la supresión del temblor manual y a la alta precisión de los movimientos, así como combinar con cistoscopia transtrocar para la litolapaxia de litiasis asociada. Además, es destacable la corta estancia hospitalaria con reincorporación a la actividad laboral del paciente, resolviendo la litiasis y la estenosis ureteropiélica simultáneamente.
ObjetivoPresentar un caso de obstrucción ureteropiélica, asociada a litiasis piélica, resuelta con plastia laparoscópica asistida con robot, más endoscopia flexible transtrocar con litolapaxia (cirugía híbrida).
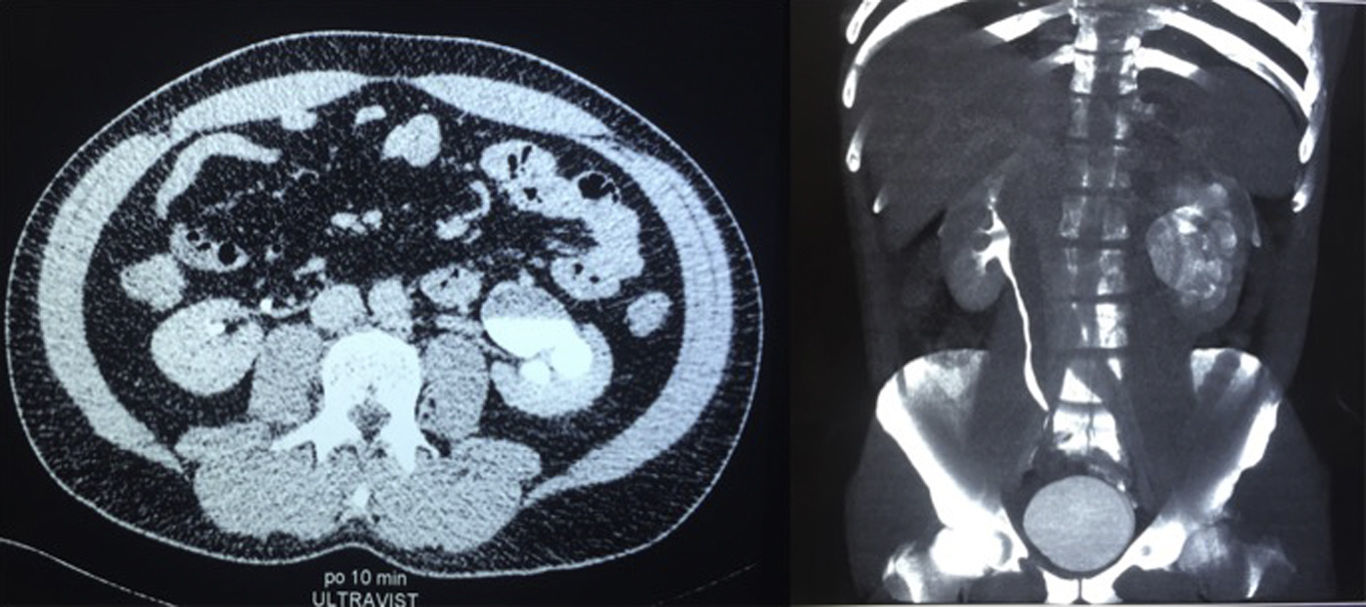
Material y métodosSe presenta caso de paciente masculino de 32 años de edad que acude a consulta por dolor tipo cólico de 6 meses de evolución, el cual se encuentra localizado en la fosa renal izquierda, de moderada intensidad sin irradiaciones, a lo que se ha agregado de manera intermitente infección de vías urinarias, durante estos 6 meses, 2cuadros caracterizados por disuria y polaquiuria sin fiebre. Se realiza exploración física y se encuentra Giordano positivo más punto ureteral superior positivo. En los estudios de extensión encontramos en la urotomografía imagen sugestiva de dilatación piélica probablemente secundaria a obstrucción ureteropiélica, además de una imagen sugestiva de lito en cáliz inferior del grupo superior. Se cuenta con gammagrama renal con función renal disminuida del lado afectado (38%) (fig. 1).

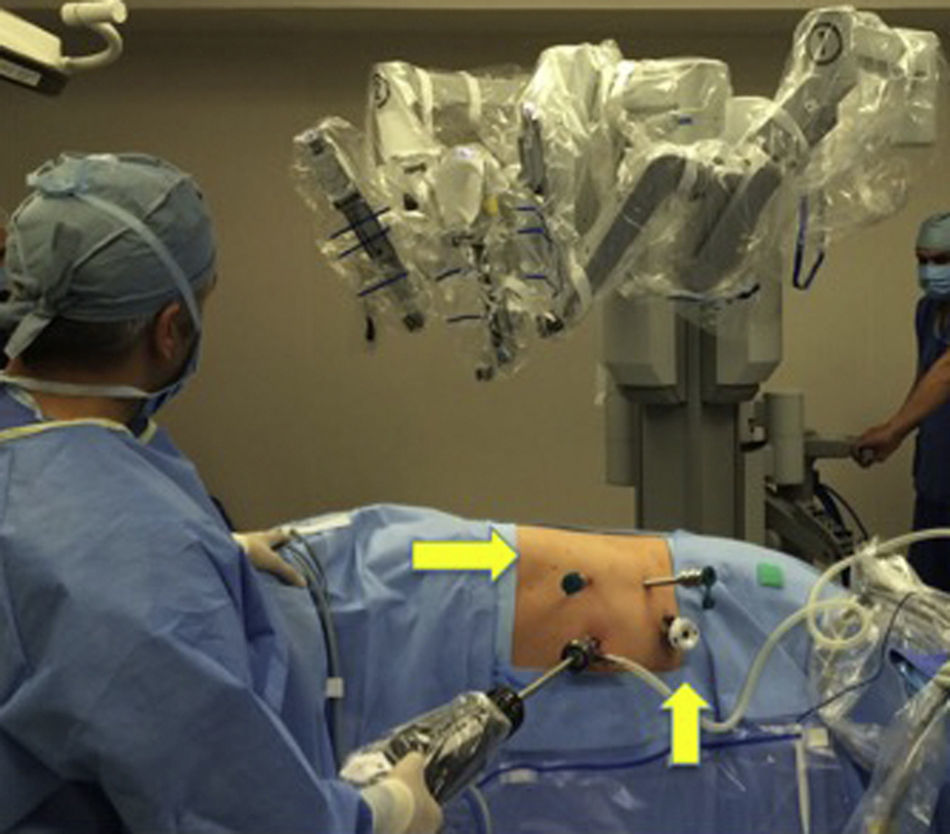
Se inicia procedimiento con la colocación de paciente en decúbito lateral derecho, en posición de navaja sevillana y se procede a instalar sistema quirúrgico DaVinci. Se realiza el docking lateral previa creación de neumoperitoneo con aguja de Veress y colocación de trocares en concepto de sectorización utilizando 3brazos del carro de robot: uno para la óptica, utilizando 0 grados durante todo el procedimiento; brazo 1 con pinza bipolar; brazo 3 con tijera monopolar más un trocar de 10mm paraumbilical y a 4cm del trocar robótico del brazo 3 para el asistente (fig. 2).

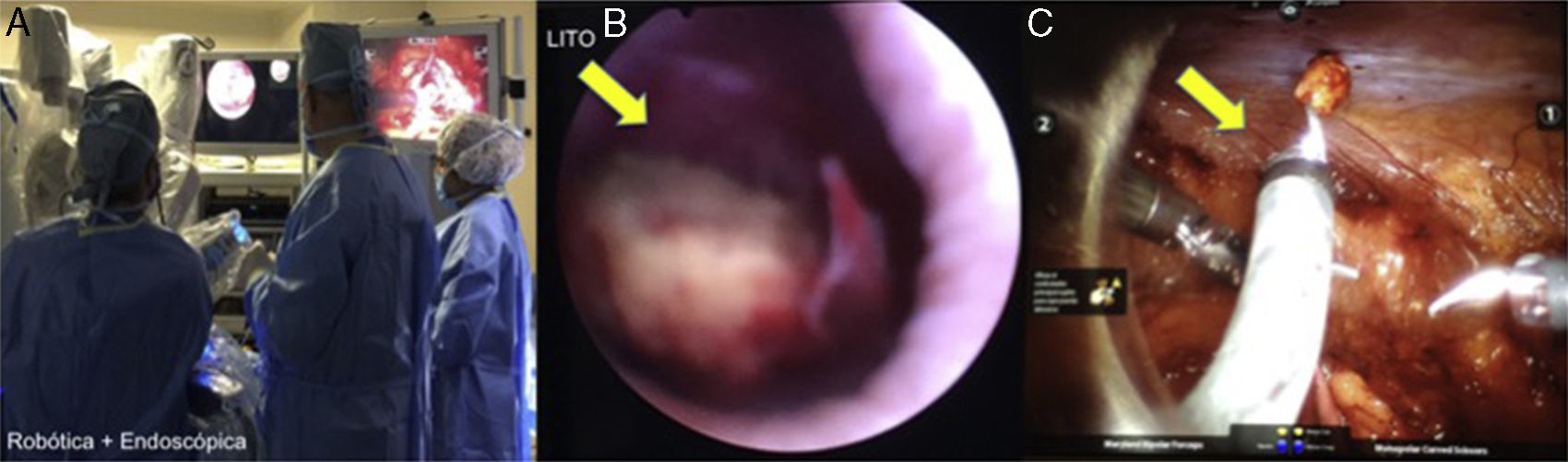
Se realiza descenso de colon, seccionando parcialmente la fascia de Toldt para mantener en posición el riñón. Se identifica la dilatación de la pelvis renal, la cual se diseca con relación a vaso gonadal, teniendo siempre como punto de referencia el músculo psoas. Se incide y corta el uréter en el sitio de obstrucción (no se identificó vaso aberrante), se realiza espatulación del uréter. Enseguida se introduce el cistoscópico flexible a través del trocar del asistente y se realiza exploración endoscópica de los cálices. Se logra identificar un lito en sistema calicial inferior, el cual se captura con canastilla y se extrae a través del trocar del asistente (12mm) (fig. 3). Enseguida se procede a realizar resección del remanente de la pelvis renal, se extrae por el trocar del asistente y se completa la plastia ureteropiélica con monocril del 3-0: primero el plano postero-lateral, de manera transcutánea se dirige y coloca una vía asistida con robot catéter ureteral doble J de 24cm×6 Fr, y se completa la plastia anterior observando previamente la adecuada colocación del rizo superior del catéter doble J. Se coloca drenaje de tipo biovack, se retira el robot y se da por terminado el procedimiento de manera exitosa. Tiempo quirúrgico 170min, sangrado 50 cc.
 Cirugía robótica+endoscópica. B) Localización del lito. C) Cistoscopia transtrocar.")
Al día siguiente se tomó control de placa simple de abdomen para visualizar la adecuada colocación del catéter ureteral doble J izquierdo. El paciente evolucionó satisfactoriamente, inició dieta y se retiró la sonda vesical al día número 2, el drenaje al día 3, mismo día del egreso.
DiscusiónDurante décadas, la pieloplastia abierta ha sido el principal tratamiento para la obstrucción de la unión ureteropiélica, con éxito reportado de 90-100% en riñones normales y de 55-80% en riñones en herradura, sin embargo, la pieloplastia mínimamente invasiva está ganando cada vez más popularidad: más de la mitad de las pieloplastias realizadas en Estados Unidos se hacen de esta manera2.
La pieloplastia laparoscópica fue introducida en 1993, y se convirtió rápidamente en una alternativa del tratamiento de la obstrucción de la unión ureteropiélica6,7. La primera serie de pieloplastia laparoscópica asistida por robot en humanos fue reportada en 2002 por Gettman con resultados favorables, mientras que Schwentner et al. demostraron en 2007 que la pieloplastia asistida por robot tiene una curva de aprendizaje menor que la pieloplastia laparoscópica estándar y ofrece resultados comparables a la pieloplastia abierta, con una tasa de éxito de 96.7% en 92 pacientes (80 reparaciones primarias y 12 reparaciones secundarias) con un seguimiento promedio de 39.1 meses, un tiempo quirúrgico de 108.3 min, estancia intrahospitalaria de 4.6 días y sangrado transoperatorio mínimo. También describieron 2 pieloplastias robóticas exitosas de riñón en herradura, con 2 migraciones de catéter con recolocación ureteroscópica y 3 complicaciones mayores, de las cuales 2 requirieron cirugía abierta8–11.
En 2008 Mufarrij et al. demuestran en una serie de 140 pacientes que no existe diferencia significativa entre la pieloplastia asistida por robot en una reparación primaria o secundaria ni con la extracción o no de lito asociado12. La serie más grande es reportada en 2012: de 168 pacientes, 147 (87.5%) con reparación primaria y 21 (12.5%) con reparación secundaria. El tiempo quirúrgico promedio fue de 134.9 min, la pérdida sanguínea estimada de 49 cc y la estancia intrahospitalaria fue de 1.5 días. El seguimiento fue de 39 meses, con una tasa de éxito de 97.6% y con complicaciones del 6.6%13. Existen pocos casos de pieloplastia laparoscópica de riñón en herradura: la serie más grande fue de 5 casos, por Bove et al. en 200414,15. La pieloplastia asistida por robot muestra buenos resultados de éxito a corto y largo plazo, además de ofrecer ventajas sobre la laparoscopia estándar como visualización tridimensional, mayor precisión, coordinación ojo-mano, eliminación del temblor, ergonomía y mayor rango de movimiento. A pesar de estas ventajas, los costos del equipo son un inconveniente en varios centros, aunque Kommu et al. demuestran en 2006 que la pieloplastia asistida por robot es 1.2 veces más costosa que la pieloplastia laparoscópica estándar16–17.
ConclusiónLa pieloplastia laparoscópica asistida por robot es una técnica factible, aunque costosa, de la reconstrucción de la unión ureteropiélica, tanto como tratamiento inicial como de reintervención. Ha mostrado resultados similares a los que ofrecen la pieloplastia abierta y la pieloplastia laparoscópica estándar, además de obtener mejores resultados estéticos y con claras ventajas en la disminución del dolor postoperatorio y en una rápida recuperación del paciente. También se logra una menor curva de aprendizaje que con el abordaje laparoscópico puro, por lo que debería ser considerada como una clara alternativa en el tratamiento de la obstrucción ureteropiélica.
Responsabilidades éticasProtección de personas y animalesLos autores declaran que para esta investigación no se han realizado experimentos en seres humanos ni en animales.
Confidencialidad de los datosLos autores declaran que en este artículo no aparecen datos de pacientes.
Derecho a la privacidad y consentimiento informadoLos autores declaran que en este artículo no aparecen datos de pacientes.
FinanciamientoLos autores no recibieron ningún patrocinio para llevar a cabo este artículo.
Conflicto de interesesLos autores declaran no tener conflicto de intereses.