



Conocer los resultados de una serie de artroplastias totales de rodilla realizadas con navegación quirúrgica en cuanto a la angulación frontal y rotación final de la rodilla intervenida, tanto a 0° de extensión como a 90° de flexión, y estudiar la influencia sobre esos resultados de determinados factores, como el índice de masa corporal, cirugía MIS y sistema informático de navegación.
Material y métodosSe ha efectuado un estudio sobre una serie personal de 145 artroplastias totales de rodilla intervenidas con un sistema inalámbrico de cirugía asistida con ordenador. Los resultados se han graduado atendiendo a la angulación frontal del eje mecánico y a la rotación final de la extremidad en extensión completa y a 90° de flexión; los datos se han recogido del sistema informático del navegador. Se ha realizado un análisis descriptivo de la serie, estudiando además la influencia en los resultados finales de determinados factores.
ResultadosLa alineación final obtenida en toda la serie se acerca a la situación ideal en cuanto al eje de la extremidad en posición frontal (0°±3°), aunque es apreciable una ligera desviación residual en varo (menos de 1°). No se encontraron diferencias en cuanto a los resultados finales en relación con los diferentes sistemas de software utilizados, ni con el índice de masa corporal, ni con el tipo de cirugía (MIS vs cirugía estándar).
ConclusionesLos resultados en cuanto a la angulación frontal en las artroplastias de rodilla implantadas con navegación quirúrgica no se modifican dependiendo de los factores estudiados.
To know the results of a total knee arthroplasty series performed with surgical navigation in frontal angulation and final rotation of the knee at both 0° and 90° of flexion and to study the influence on these results of certain factors such as body mass index, minimal invasive surgery and computer navigation software.
Material and methodsA study was carried out on a personal series of 145 total knee arthroplasty operated with a wireless system of computer assisted surgery. The results have been graded taking into account the frontal angulation of the mechanical axis and the final rotation of the limb at 0° and at 90° of flexion. The data has been collected from the computer system database. A descriptive analysis of the series has been made, also studying the influence on the final results of certain factors.
ResultsThe final alignment obtained in the whole series is close to the ideal situation regarding the angulation of the limb in frontal position (0°±3°), although a slight residual deviation in varus is appreciable (less than 1°). No differences were found in the final results in relation to the different software systems used, neither with the body mass index nor with the type of surgery (minimal invasive surgery vs standard surgery).
ConclusionsResults regarding the front mechanical axis of the knee replacements performed with surgical navigation are not changed depending on the factors studied.
La artroplastia total de rodilla (ATR) aporta habitualmente una disminución del dolor, un aumento de la función y una evidente mejoría en la calidad de vida relacionada con la salud. Unos mejores diseños, la utilización de nuevos materiales e instrumentaciones, la corrección del balance ligamentoso y la posibilidad de reproducir el eje mecánico de la extremidad han propiciado unos excelentes resultados y la incorporación definitiva de esta técnica a la práctica clínica habitual.
No obstante, es aún considerable el porcentaje de complicaciones que llegan a provocar el fracaso de este procedimiento, oscilando en la literatura entre el 5% y el 8%1. Aunque este fracaso puede obedecer a varias causas, la incorrecta posición u orientación de los componentes protésicos es el factor más sólidamente relacionado con el desgaste acelerado del polietileno de la bandeja tibial, con el deslizamiento de los componentes, con la presencia de complicaciones del aparato extensor y, en fin, con la degradación funcional de la articulación a medio y largo plazo2.
La malposición en valgo y sobre todo en varo ha sido reportada como la mayor causa de fracaso mecánico de la ATR3. Con la instrumentación mecánica se ha demostrado que más del 8% de los cortes femorales son defectuosos4 debido a diversos factores, desde la inexactitud del corte por defecto de las sierras quirúrgicas hasta el lugar de introducción de la guía intramedular femoral o el tamaño del orificio de entrada5. Por otro lado, la anormal rotación de los componentes protésicos provoca una influencia nociva en el deslizamiento de la rótula sobre el fémur y es origen de graves complicaciones patelares6.
Se considera esencial, por tanto, la colocación exacta del componente femoral y tibial, siguiendo escrupulosamente el eje mecánico de la extremidad. Este eje mecánico (que sigue una línea desde el centro de la cabeza del fémur hasta el centro de la articulación del tobillo) debe reproducirse al implantar una ATR, lo que no siempre puede conseguirse con la utilización de los instrumentos quirúrgicos convencionales, que se apoyan en medidas geométricas estandarizadas o en impresiones subjetivas, sin individualizar las particularidades anatómicas.
La informática pretende facilitar los gestos manuales y mentales mediante la exactitud que ofrece la lógica matemática. A finales de la década de los 90 del pasado siglo se empezaron a utilizar en cirugía ortopédica sistemas de cirugía asistida con ordenador (CAO), también denominada navegación quirúrgica, que ya antes habían sido introducidos en neurocirugía, y en menor medida en cirugía vertebral.
Desde hace 16 años7 estamos implantando ATR con ayuda de la navegación quirúrgica. El presente trabajo analiza los resultados en cuanto a la alineación frontal de la rodilla artroplástica, basándose en los datos aportados por el navegador. Los objetivos de este trabajo han sido conocer los resultados globales de una serie de ATR intervenidas con CAO en cuanto a la angulación frontal y rotación final de la rodilla intervenida, tanto en extensión completa como a 90° de flexión, y estudiar la influencia sobre esos resultados de determinados factores que están confusos en la literatura: índice de masa corporal (IMC), técnica de cirugía mínimamente invasiva (MIS) y sistema informático (software) de navegación.
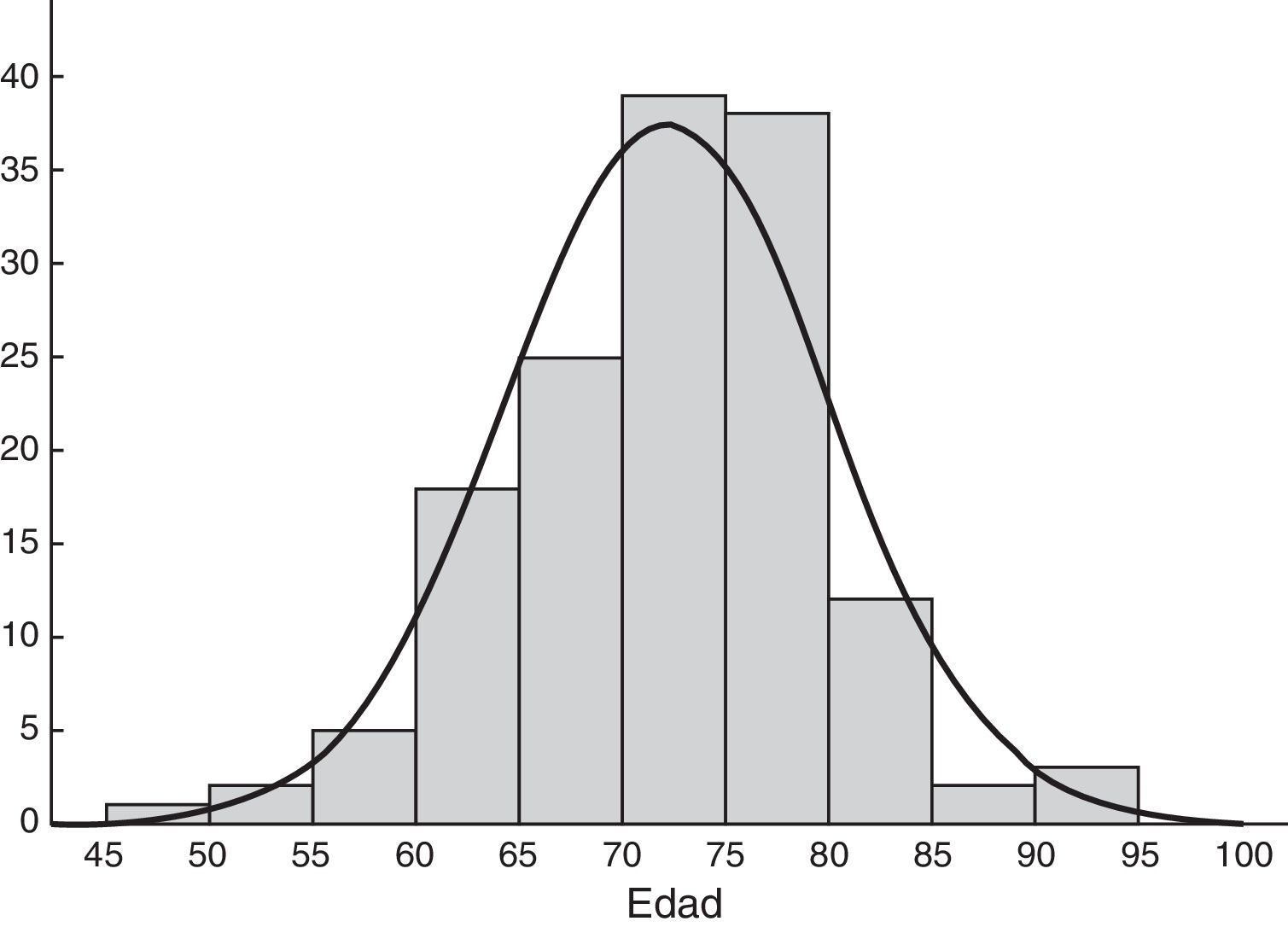
Material y métodosEstudio observacional descriptivo de una serie de casos. La serie estudiada se refiere a pacientes intervenidos quirúrgicamente para implantar una ATR primaria mediante CAO, utilizando el mismo modelo protésico, el mismo sistema de navegación, la misma pauta pre y postoperatoria y los mismos cirujanos. El número total de casos fue de 267. Los criterios de inclusión fueron: pacientes con artrosis de rodilla grado iii o iv de Ahlback, fracaso de tratamiento conservador previo durante 6 meses, intervención quirúrgica completada con el mismo sistema de navegación y recogida y archivo de datos en programa informático. Una vez aplicados estos criterios, la serie analizada cuenta con 145 casos, de los que en 48 se utilizó MIS. La serie constó de 108 mujeres y 37 hombres. En 8 casos se utilizó la navegación para implantar la ATR en las 2 rodillas. Los datos antropométricos aparecen en la tabla 1. La edad media de los pacientes fue de 72 años (DE=7,73) (fig. 1).

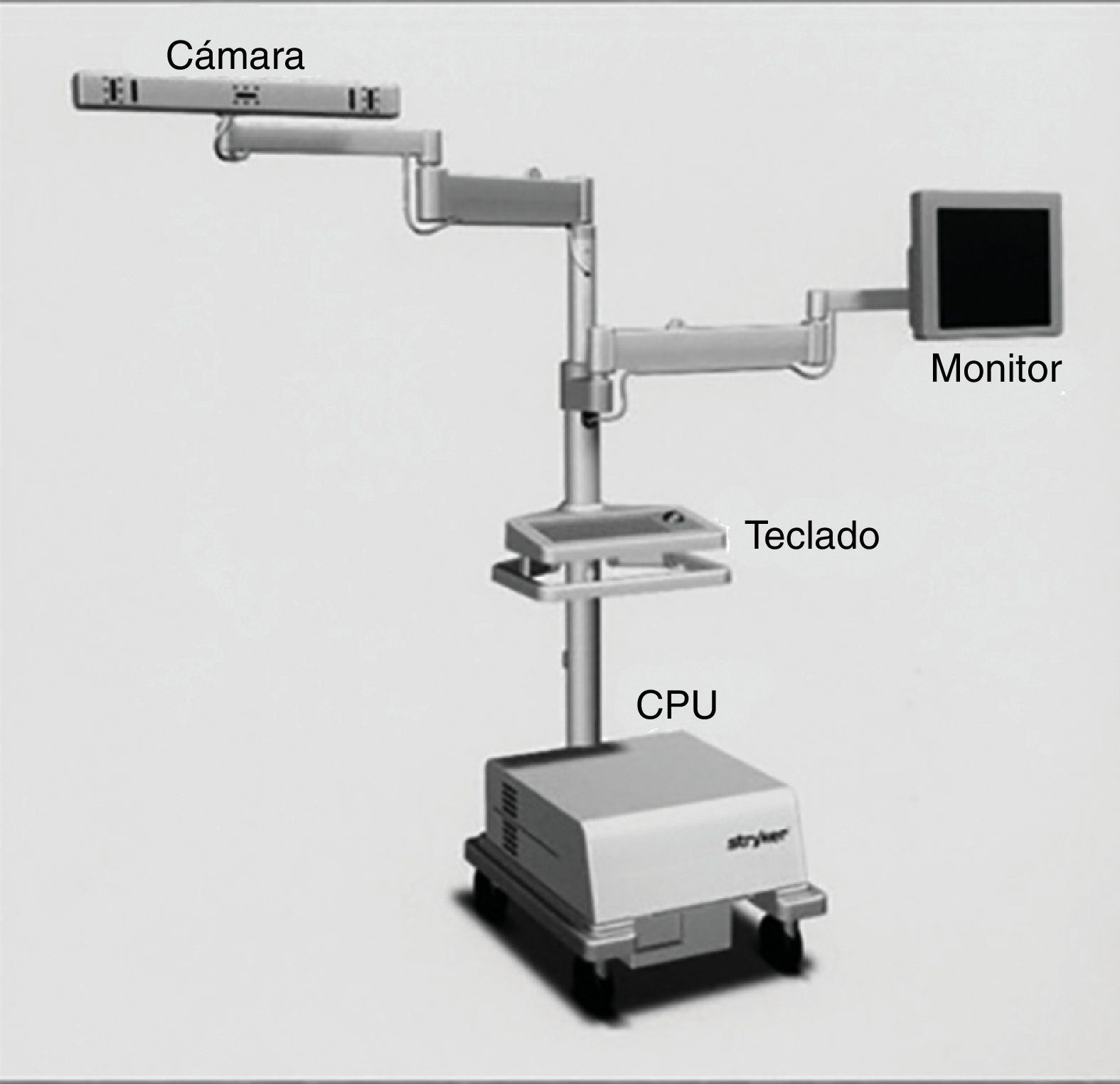
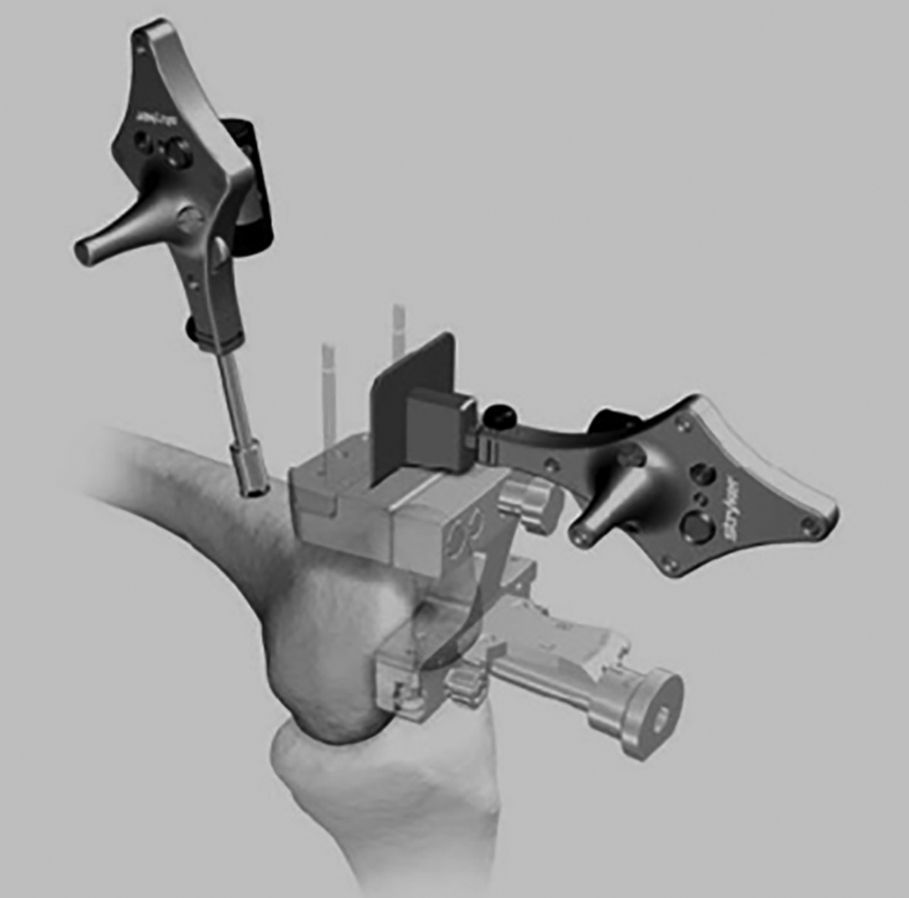
El sistema de navegación que se ha utilizado es inalámbrico (Stryker Navigation System, Kalamazoo, MI 49002, EE. UU.) (fig. 2). Consta de una estación de trabajo con cámara optoelectrónica que localiza puntos de emisión de luz-diodos con un margen de error de 1mm (equivalente a un error de orientación de 1°), 2 diodos emisores de luz infrarroja LED montados en brocas que se introducen en la cara lateral de la extremidad distal del fémur y extremidad proximal de la tibia, provistos de una batería de litio y un puntero con emisores infrarrojos. La intervención comienza hallando el centro de rotación de la cabeza femoral mediante movimientos circunferenciales de la cadera (en los primeros sistemas era obligatorio colocar un sensor en la cresta iliaca correspondiente). Se procede entonces a la artrotomía de la rodilla, bien de manera convencional bien con la técnica MIS (fig. 3). Se digitalizan las superficies de la cara anterior de la metáfisis femoral distal, de los cóndilos femorales y de las mesetas tibiales y se toman referencias en los 2 epicóndilos femorales y en los 2 maléolos del tobillo, así como en el centro de la rodilla y del tobillo; igualmente se realiza una valoración de la cinemática de la rodilla. Cuando ha finalizado esta valoración preoperatoria se realizan los cortes óseos siguiendo las imágenes orientativas que aparecen en el monitor, y que indican cuál es la posición correcta de aquellos según la imagen virtual previamente formalizada (fig. 4). El sistema permite una valoración preoperatoria de las deformidades y del entorno ligamentoso, una evaluación de la técnica intraoperatoriamente y una estimación de la situación final, en lo relativo tanto al grosor y orientación de los cortes realizados como a la movilidad final y estado de las partes blandas.



La información para este trabajo se recogió a partir de la base de datos del sistema de navegación, para lo cual se diseñó una herramienta informática de traducción a un formato ofimático estándar. Posteriormente se transformó en una base de datos en entorno Windows para realizar el análisis estadístico. Se analizaron todas las variables de forma descriptiva con frecuencias absolutas y relativas para las variables categóricas y media, mediana y desviación típica para las variables cuantitativas. Se efectuaron las pruebas de hipótesis de acuerdo al tipo y la distribución de las variables, considerándose como estadísticamente significativos aquellos resultados con valores de p menores de 0,05. Se ha utilizado la prueba «t» de Student para muestras relacionadas en los análisis de alineación pre y postoperatoria, el modelo general lineal para el análisis de varianza para mediciones repetidas (factor intrasujetos: mediciones iniciales y finales; factor entresujetos: sistema de navegación, MIS) y la correlación de Pearson para analizar la relación entre las variables cuantitativas, IMC y ángulos de alineación y rotación. Se utilizó el paquete de análisis estadístico SPSS 12 para Windows.
A lo largo de todo el estudio la angulación en varo y rotación externa se consideraron con signo negativo. La angulación ideal perseguida en el eje frontal fue de 0°±3°.
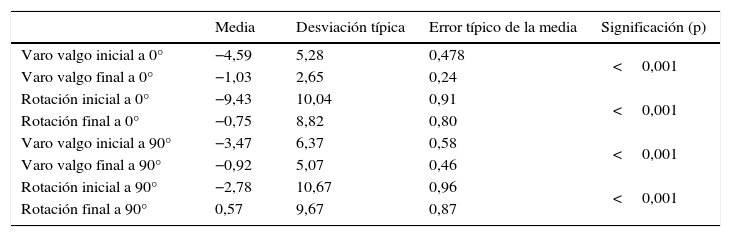
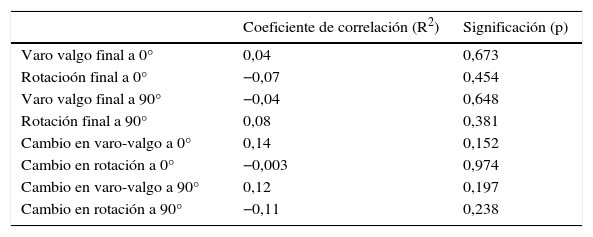
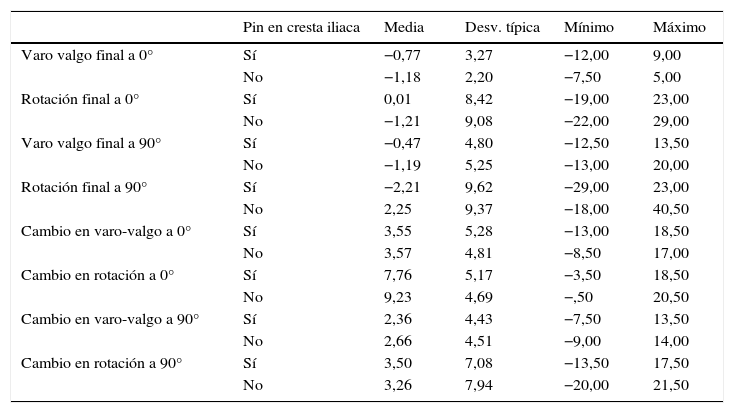
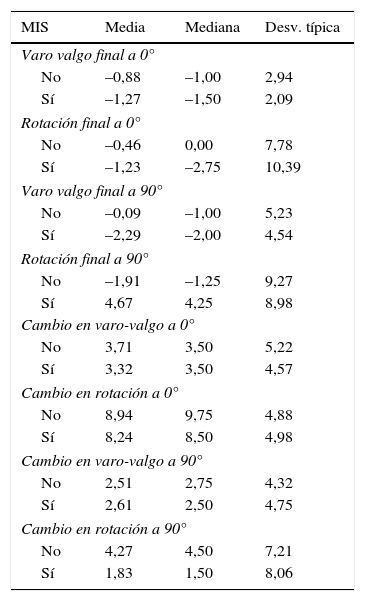
ResultadosLa situación previa mostró una deformidad media en varo de –4,6° a 0° y de –3,5° a 90° de flexión. En la tabla 2 se muestran los resultados atendiendo a la alineación inicial y final, donde se apreció una deformidad media final en varo de –1° en extensión y de –0,9° a 90° de flexión. La rotación inicial a 0° descendió desde –9,5° a –0,7 y a 90° de flexión de –2,8° a 0,6°. Se encontraron diferencias estadísticamente significativas entre la situación inicial y final en todas las determinaciones. No se encontró correlación entre el IMC y los resultados finales en cuanto a varo-valgo y rotación (tabla 3). Al estudiar los resultados dependiendo del software utilizado (las primeras versiones necesitaban la colocación de un emisor en la cresta iliaca, gesto que fue anulado en las versiones posteriores), no se encontraron diferencias estadísticas dependiendo de la versión utilizada (tabla 4). Tampoco se encontraron diferencias en la alineación final varo-valgo y en la rotación a 0° y a 90° de flexión, comparando con la cirugía estándar y la técnica MIS (tabla 5).
Resultados comparando deformidad varo-valgo y rotación entre situación inicial y final
| Media | Desviación típica | Error típico de la media | Significación (p) | |
|---|---|---|---|---|
| Varo valgo inicial a 0° | −4,59 | 5,28 | 0,478 | <0,001 |
| Varo valgo final a 0° | −1,03 | 2,65 | 0,24 | |
| Rotación inicial a 0° | −9,43 | 10,04 | 0,91 | <0,001 |
| Rotación final a 0° | −0,75 | 8,82 | 0,80 | |
| Varo valgo inicial a 90° | −3,47 | 6,37 | 0,58 | <0,001 |
| Varo valgo final a 90° | −0,92 | 5,07 | 0,46 | |
| Rotación inicial a 90° | −2,78 | 10,67 | 0,96 | <0,001 |
| Rotación final a 90° | 0,57 | 9,67 | 0,87 |
Correlaciones del índice de masa corporal con los resultados finales
| Coeficiente de correlación (R2) | Significación (p) | |
|---|---|---|
| Varo valgo final a 0° | 0,04 | 0,673 |
| Rotacioón final a 0° | −0,07 | 0,454 |
| Varo valgo final a 90° | −0,04 | 0,648 |
| Rotación final a 90° | 0,08 | 0,381 |
| Cambio en varo-valgo a 0° | 0,14 | 0,152 |
| Cambio en rotación a 0° | −0,003 | 0,974 |
| Cambio en varo-valgo a 90° | 0,12 | 0,197 |
| Cambio en rotación a 90° | −0,11 | 0,238 |
Resultados atendiendo a las versiones de software utilizadas
| Pin en cresta iliaca | Media | Desv. típica | Mínimo | Máximo | |
|---|---|---|---|---|---|
| Varo valgo final a 0° | Sí | −0,77 | 3,27 | −12,00 | 9,00 |
| No | −1,18 | 2,20 | −7,50 | 5,00 | |
| Rotación final a 0° | Sí | 0,01 | 8,42 | −19,00 | 23,00 |
| No | −1,21 | 9,08 | −22,00 | 29,00 | |
| Varo valgo final a 90° | Sí | −0,47 | 4,80 | −12,50 | 13,50 |
| No | −1,19 | 5,25 | −13,00 | 20,00 | |
| Rotación final a 90° | Sí | −2,21 | 9,62 | −29,00 | 23,00 |
| No | 2,25 | 9,37 | −18,00 | 40,50 | |
| Cambio en varo-valgo a 0° | Sí | 3,55 | 5,28 | −13,00 | 18,50 |
| No | 3,57 | 4,81 | −8,50 | 17,00 | |
| Cambio en rotación a 0° | Sí | 7,76 | 5,17 | −3,50 | 18,50 |
| No | 9,23 | 4,69 | −,50 | 20,50 | |
| Cambio en varo-valgo a 90° | Sí | 2,36 | 4,43 | −7,50 | 13,50 |
| No | 2,66 | 4,51 | −9,00 | 14,00 | |
| Cambio en rotación a 90° | Sí | 3,50 | 7,08 | −13,50 | 17,50 |
| No | 3,26 | 7,94 | −20,00 | 21,50 |
Diferencias entre cirugía estándar y MIS
| MIS | Media | Mediana | Desv. típica |
|---|---|---|---|
| Varo valgo final a 0° | |||
| No | –0,88 | –1,00 | 2,94 |
| Sí | –1,27 | –1,50 | 2,09 |
| Rotación final a 0° | |||
| No | –0,46 | 0,00 | 7,78 |
| Sí | –1,23 | –2,75 | 10,39 |
| Varo valgo final a 90° | |||
| No | –0,09 | –1,00 | 5,23 |
| Sí | –2,29 | –2,00 | 4,54 |
| Rotación final a 90° | |||
| No | –1,91 | –1,25 | 9,27 |
| Sí | 4,67 | 4,25 | 8,98 |
| Cambio en varo-valgo a 0° | |||
| No | 3,71 | 3,50 | 5,22 |
| Sí | 3,32 | 3,50 | 4,57 |
| Cambio en rotación a 0° | |||
| No | 8,94 | 9,75 | 4,88 |
| Sí | 8,24 | 8,50 | 4,98 |
| Cambio en varo-valgo a 90° | |||
| No | 2,51 | 2,75 | 4,32 |
| Sí | 2,61 | 2,50 | 4,75 |
| Cambio en rotación a 90° | |||
| No | 4,27 | 4,50 | 7,21 |
| Sí | 1,83 | 1,50 | 8,06 |
Nuestro estudio muestra en primer lugar que el sistema inalámbrico utilizado para la navegación quirúrgica consigue una buena colocación frontal y rotacional de la ATR. Por otra parte, esos resultados no se modifican dependiendo del IMC, versión del software e implante a través de técnicas MIS. La navegación consigue una alineación de los componentes constante, desde la extensión completa hasta la flexión de 90°.
El perfeccionamiento de la instrumentación conseguido en los últimos años para la colocación de las ATR permite una aproximación al eje mecánico ideal; esta mejoría puede considerarse como un hecho esencial para la obtención de mejores resultados a largo plazo. A pesar de ello, y aun con una dilatada experiencia en la colocación de ATR, es imposible reproducir con la instrumentación actual una posición exacta y reglada de los implantes, y en la literatura se aceptan errores entre 2° y 12° en el plano frontal, comunicándose que cerca del 10% de los cortes tibiales son incorrectos8. Mahalusmiwala et al.9 revisaron retrospectivamente la angulación fémoro-tibial obtenida en 673 ATR; el ángulo fémoro-tibial ideal solo se había obtenido en el 75% de los casos, sin apreciarse diferencias entre las ATR colocadas por cirujanos expertos o médicos residentes, siendo llamativa la frecuente colocación en varo del componente tibial.
Si existen dificultades para evitar posiciones inadecuadas frontales en varo-valgo aún son mayores para predecir la correcta rotación de los componentes protésicos, otro factor esencial para una duradera supervivencia de la artroplastia10. Este aspecto de la colocación de las ATR cobra importancia cuando se conoce que los defectos rotacionales son responsables de complicaciones que afectan al deslizamiento fémoro-patelar y a la presencia de dolor en la cara anterior de la rodilla, e incluso son una causa frecuente del fracaso del implante. Existe una amplia literatura que insiste en la necesidad de encontrar instrumentos que permitan individualizar la rotación, sobre todo del componente femoral, llamando la atención sobre la necesidad de calcular mejor el eje transepicondíleo en el momento del implante11, hallazgo que la instrumentación actualmente disponible no permite.
Por tanto, aun reconociendo las ventajas y posibilidades que aporta la instrumentación mecánica en las ATR, ciertamente persisten problemas sin resolver, particularmente referidos a la angulación frontal, lateral y coronal. De otro lado la exploración ligamentosa y el balance final obtenido se basan en impresiones subjetivas, y su defecto contribuye también en buena medida al fracaso de la artroplastia.
Aunque la experiencia clínica y la literatura sobre la CAO en las ATR es ya considerable, existen cuestiones aún no resueltas. Su utilidad en grandes deformidades, la transcendencia y duración de la curva de aprendizaje, las mejoras que pueden aportar los nuevos programas informáticos (software), su utilidad a largo plazo, etc., son aspectos aún no conocidos en esta novedosa técnica. Tanto la obesidad como la curva de aprendizaje son factores que pueden modificar los resultados, aunque la literatura no es concluyente. Por otra parte, en los primeros sistemas era obligatorio tomar como referencia la cresta iliaca para hallar el centro de rotación de la cadera. Posteriormente, con la introducción de los nuevos programas informáticos, no se necesita esta referencia, lo que facilita la técnica y disminuye el tiempo quirúrgico, pero no se han publicado estudios comparativos entre ambos métodos en cuanto al eje mecánico obtenido.
Existen suficientes trabajos que muestran los resultados finales de la intervención con CAO analizando la alineación frontal y rotacional de la extremidad en extensión completa, pero no se ha podido hasta ahora comprobar esta alineación en el momento de flexión a 90°. Conocemos bien el eje mecánico y anatómico de la rodilla, pero aún está en estudio el denominado eje cinemático, que solo a través de la navegación podrá explorarse. Con esta técnica es posible analizar lo que sucede en la rodilla al realizar la flexo-extensión, y puede ocurrir que la obtención de un eje mecánico neutro en extensión completa no sea tan buen resultado si se considera cómo está la rodilla a 90° de flexión. En nuestro trabajo hemos anotado la deformidad en extensión completa y en flexión de 90°, tanto en el eje frontal como rotacional. Este aspecto es novedoso en los artículos sobre navegación, y muestra cómo esta técnica es capaz de colocar una ATR correctamente sin alterarse la alineación al modificar el eje cinemático de la rodilla.
La MIS, o técnica con mínima incisión, supone una menor alteración de los tejidos blandos y secundariamente un mayor bienestar del paciente en cuanto al dolor postoperatorio, la menor presencia de complicaciones inmediatas, el alta precoz hospitalaria, una recuperación funcional más rápida y un menor impacto estético. Todo ello puede disminuir el consumo de recursos sanitarios. Tradicionalmente la ATR se ha realizado utilizando una incisión parapatelar de unos 18-20cm que en profundidad supone una incisión capsular que separa el recto femoral y el vasto medial y se prolonga a través del tendón cuadricipital en una extensión de 3-5cm. Esta vía, aunque ofrece una magnífica exposición articular, produce un gran sufrimiento del aparato extensor de la rodilla, y puede llevar a adherencias o retracciones, dificultando la recuperación de la flexión de la rodilla, limitando de manera permanente su movilidad12,13 o alterando la rótula y su normal deslizamiento. Los cambios principales de la técnica MIS14 respecto a la técnica convencional pueden resumirse en incisión de menor longitud (unos 10-12cm frente a los 18-20cm de la técnica habitual), no se realiza eversión de la patela para acceder a la interlínea fémoro-tibial, con lo que disminuye el daño del aparato extensor de la rodilla, se evita la luxación de la articulación fémoro-tibial para la colocación del componente tibial de la prótesis y se respeta al máximo el aparato extensor de la rodilla, a nivel del músculo cuadricipital.
Un artículo de revisión ha evaluado los trabajos publicados sobre MIS en ATR15. En todos ellos se presentan resultados que mejoran a corto plazo los obtenidos con la técnica convencional, en cuanto a la comodidad del paciente y a la estancia hospitalaria. Incluso agencias nacionales de calidad16,17 han emitido documentos de recomendaciones sobre este procedimiento. No obstante, en nuestra experiencia18 los resultados en un plazo medio de seguimiento no se diferencian de los obtenidos con cirugía estándar. De hecho, puede considerarse actualmente que la MIS solo ha sido útil para demostrar que es posible colocar una ATR con una menor incisión cutánea y con maniobras menos traumáticas. Es posible que la técnica MIS tenga que considerarse más un condicionante personal del paciente, o una demanda comercial, que un verdadero progreso en la colocación de una ATR. El cirujano debe buscar cuál es, en sus manos, el tamaño mínimo necesario para colocar correctamente una ATR huyendo de desafíos para demostrar que tiene la capacidad de implantar una ATR a través de incisiones cada vez más pequeñas. Este requisito, a la postre, no deja de ser un condicionante habitual en cualquier cirujano de nuestros días19. La asociación de la navegación quirúrgica a las técnicas MIS pueden suponer un avance prometedor en el implante de una ATR. La navegación aporta seguridad en la técnica, proporciona una visión espacial, permite comprobar lo que estamos haciendo y controla permanentemente lo realizado20,21.
DiGioia22, cirujano pionero de la CAO, la define como un «sistema capaz de realizar determinadas tareas mejor que la máquina o el hombre aisladamente». La acción sinérgica del ordenador y del cirujano puede aumentar la calidad de la técnica quirúrgica y cuantificar, caracterizar y validar la práctica clínica, en resumen, resolver satisfactoriamente un problema clínico, recogiendo fácilmente información y con un relativo bajo coste. Son muchas las ventajas que aporta la navegación en el implante de una artroplastia de rodilla: posibilidad de referenciar el eje transepicondíleo, seguridad en la realización de los cortes y resecciones óseas, hallazgo del eje mecánico verdadero, ausencia de radiaciones, innecesario requerimiento de estudios preoperatorios, posibilidad de conocer la cinemática y el balance ligamentoso de la rodilla, etc. Estudios prospectivos comparando la cirugía con y sin navegación han demostrado mejores resultados en cuanto a la posición del implante cuando se utiliza la CAO23, sobre todo ante deformidades de la rodilla24. Además, permite introducir un control de calidad en la cirugía artroplástica de la rodilla, reconocer los errores en los que previamente se incurría y que los jóvenes cirujanos mejoren la técnica quirúrgica, mediante el entrenamiento dirigido. Cuando la instrumentación endomedular no es posible por deformidades previas o por la presencia de material de osteosíntesis remanente, la CAO es una excelente alternativa.
Se han publicado numerosos metaanálisis y estudios comparativos entre la técnica con navegación y estándar en ATR25–27. En todos ellos se confirma que la navegación aporta una mejor alineación del implante, sobre todo en el plano frontal. Hay menos evidencia en cuanto a la mejoría en la posición rotacional28, sobre todo derivado de la variabilidad de las referencias anatómicas que se consideran para la navegación. Aunque aún no se ha demostrado que a largo plazo la utilización de la CAO mejore los resultados, ya se conoce que disminuye el porcentaje de cirugía de revisión29. Si está aceptado que las condiciones imprescindibles para obtener una mejor función de la rodilla artroplástica son la perfecta colocación de los implantes y un correcto balance ligamentoso, esta técnica, que consigue ambas premisas, puede ya considerarse como una técnica plenamente establecida.
Nuestro trabajo tiene limitaciones. Debe considerarse que se ha realizado recolectando los datos exclusivamente del sistema de navegación. Por tanto, no se ha estimado la angulación fémoro-tibial real, que puede ser diferente al no haberse recogido en bipedestación.
Como conclusiones a nuestro estudio puede anotarse que la alineación final obtenida en la serie se acerca a la situación ideal en cuanto a la angulación mecánica de la extremidad en posición frontal. La navegación consigue la colocación del implante de manera correcta, tanto en extensión como en flexión de 90°. No encontramos diferencias en los resultados dependiendo de los diferentes sistemas de software utilizados (sensor colocado en la cresta iliaca en los primeros), el IMC de los pacientes o la utilización de la técnica MIS.
FinanciaciónEsta línea de investigación ha sido apoyada por varios proyectos de investigación subvencionados por el Instituto Español de Salud Carlos III con fondos FEDER y por la Fundacion Mapfre.
Conflicto de interesesLos autores declaran no tener ningún conflicto de intereses.