



El hombro es uno de los Sistemas articulares más complejo del cuerpo humano. Conocer su funcionamiento es primordial para entender la biomecánica del cuerpo. El propósito de este estudio ha sido el de analizar la influencia de los Sistemas de Coordenadas Locales en la interpretación de los valores cinemáticos de la articulación GlenoHumeral. Se ha utilizado para ello un método invasivo, colocando pines trabeculares en el hombro y la escápula. El rastreo del movimiento se ha realizado mediante el uso de sensores pasivos. El procesamiento de los datos se ha efectuado mediante el uso de la plataforma de software libre pyFormex. Los desplazamientos de la articulación se han determinado mediante dos variantes diferentes de Sistemas de Coordenadas, detectándose una diferencia de 2 a 12 grados.
The shoulder is one of the most complex systems in the human body. To know how its work is essential to understand the biomechanics of the body. The purpose of this study was to analyze the influence of Local Coordinate Systems in the kinematic analysis of GlenoHumeral joint. The motion tracking was performed using passive sensors attached to pins. Trabecular pins were placed on the shoulder and scapula. The data processing was performed using the free open software pyFormex. The joint displacements were determined by two different variants of Coordinate Systems, being detected a difference from 2 to 12 degrees.
El hombro presenta uno de los Sistemas articulares de mayor complejidad del cuerpo humano, dando un balance entre la movilidad y la estabilidad [1]. El hombro como Sistema complejo está compuesto por tres huesos (clavícula, húmero, y escápula) y cuatro articulaciones (EsternoClavicular, AcromioClavicular, EscapuloTorácica, y GlenoHumeral) encargadas de unir los huesos a entidades funcionales [2].
La articulación GlenoHumeral (GH) es una articulación sinovial que mecánicamente puede ser descrita del tipo macho-hembra (ball & socket). Está formada por una gran cabeza humeral (macho) y una pequeña cavidad glenoidea de la escápula (hembra). El movimiento entre la escápula y el húmero es el encargado de estabilizar el brazo a lo largo de su recorrido, comúnmente llamado el Ritmo del Húmero (RH). El primero en describir este movimiento fue Inman y colaboradores en 1944 [3]. Posteriormente muchos investigadores han medido RH tanto para hombros normales como con patologías [4–8]. Se puede apreciar que para pacientes con patologías es relevante la detección de las pequeñas variaciones en los movimientos, por lo que se necesita de un procedimiento preciso; ello permitiría establecer la influencia del tratamiento en la recuperación.
Estos estudios se dividen en dos grupos principales, los invasivos [9–12] y los no invasivos [13–16]. Los investigadores que recurren a los métodos no invasivos por lo general utilizan marcadores colocados en la piel, agregando errores a los resultados, independientemente del movimiento que haga el cuerpo. Dichos errores pueden clasificarse en dos tipos de categoría diferentes. El primero se encuentra asociado al movimiento colectivo de todos los marcadores superficiales, movimiento sincrónico del juego de marcadores colocados encima de los huesos. Normalmente este es causado por el tejido blando que cambia de sitio al unísono. En este estudio, para evitar este error se utiliza un método invasivo insertando pines trabeculares en los huesos. El segundo error se encuentra asociado al desplazamiento relativo de los marcadores individuales, donde la distancia entre los marcadores varía durante los experimentos. Este es el resultado del movimiento no rígido del marcador puesto, causado por la elasticidad superficial, deformación del tejido suave e inexactitud en la medición. Para evitar este problema se realizan incisiones en el cuerpo, en los puntos donde se colocaron los pines, permitiendo el desplazamiento de la piel y el tejido suave durante las pruebas.
El comité de Estandarización y Terminología de la Sociedad Internacional de Biomecánica (International Society of Biomechanics ISB) ha propuesto una recomendación para la regularización de la captura y análisis del movimiento de la extremidad superior, definiendo un juego de marcadores, Sistemas de Coordenadas Locales (SCL) y sucesión de rotaciones para el estudio de la cinemática del hombro [17]. Sin embargo, los trabajos realizados por Senk y Cheze en 2006 han informado que existen dos desventajas a la hora de utilizar una sucesión de rotaciones [18]. La primera corresponde a una indeterminación matemática de los valores cercanos a 0 o 180 grados, la cual es comúnmente llamada «Gimbal lock». El segundo problema consiste en la dependencia que posee la descripción del movimiento de la secuencia de rotaciones seleccionada para el análisis [14,19,20]. Esto puede producir inconsistencias entre la representación cinemática del movimiento y la interpretación clínica del mismo. Senk y Cheze demostraron que para el Sistema de Coordenadas propuesto por la ISB ninguna secuencia de rotaciones permite interpretar clínicamente todos los posibles movimientos del brazo [18]. En consonancia con esto, en 2007 Levasseur realizó un estudio para determinar los efectos que tiene la alineación de los Sistemas de Coordenadas en el análisis cinemático del hombro, detectando variaciones poco significativas, desde el punto de vista clínico, entre el Sistema de Coordenadas matemáticamente alineado y el no alineado [21]. Existen dos formas de alinear los Sistemas de Coordenadas, una matemáticamente y otra anatómicamente. La alineación anatómica en nuestra opinión nos permite colocar el Sistema de Coordenadas de una forma personalizada, facilitando el estudio de individuos con patología. El objetivo de este estudio ha sido analizar la influencia de los Sistemas de Coordenadas Locales, en la interpretación de los valores cinemáticos de la articulación GlenoHumeral para diferentes movimientos del brazo.
2Materiales y métodosEl método utilizado para el análisis cinemático consiste en tres pasos principales: Preparación del objeto de estudio, Adquisición de las Imágenes y Modelado tridimensional (3D) y Procesamiento de los datos.
2.1Preparación del objeto de estudioEste estudio fue aprobado por el Comité de Revisión Institucional en la Universidad de Gantes y es el fruto de la colaboración entre el Grupo de IBiTech-bioMMeda (Ghent University), el departamento de Ortopedia (Ghent University Hospital) y el Grupo de Biomecánica (ISPJAE Cuba). El sujeto de muestra fue un cadáver de una mujer de 45 años de edad suministrado por el departamento de Anatomía (Ghent University Hospital). Se comprobó que el sujeto no presentara ninguna historia de trauma, fractura, debilidad o dislocación en el hombro.
La preparación comenzó con la colocación de una serie de marcadores óseos en la escápula, húmero, etc., teniendo en cuenta las recomendaciones de la ISB [17]. Los marcadores utilizados están constituidos por un pin central que se une al hueso. En su extremo superior pueden tener un sensor o una estructura en forma de cruz que soporta 4 sensores. En el experimento, se garantizó que existiera un marcador en forma de cruz para cada hueso, lo cual permitió comprobar si existía desplazamiento entre los marcadores. Esto disminuye los errores, detectando con mayor exactitud la ubicación de los huesos durante el movimiento. Se verificó que los marcadores no impidieran el desplazamiento y rotación del brazo durante los experimentos, comprobando que los sensores permanecían fijos a lo largo de las pruebas. Para la captura del movimiento se utilizaron sensores pasivos (reflexivos) de unos 14mm de diámetro, atados a pines trabeculares de unos 62mm de largo. Las incisiones realizadas para la colocación de los pines fueron de 2cm de longitud, permitiendo el desplazamiento de la piel y el tejido suave durante las pruebas.
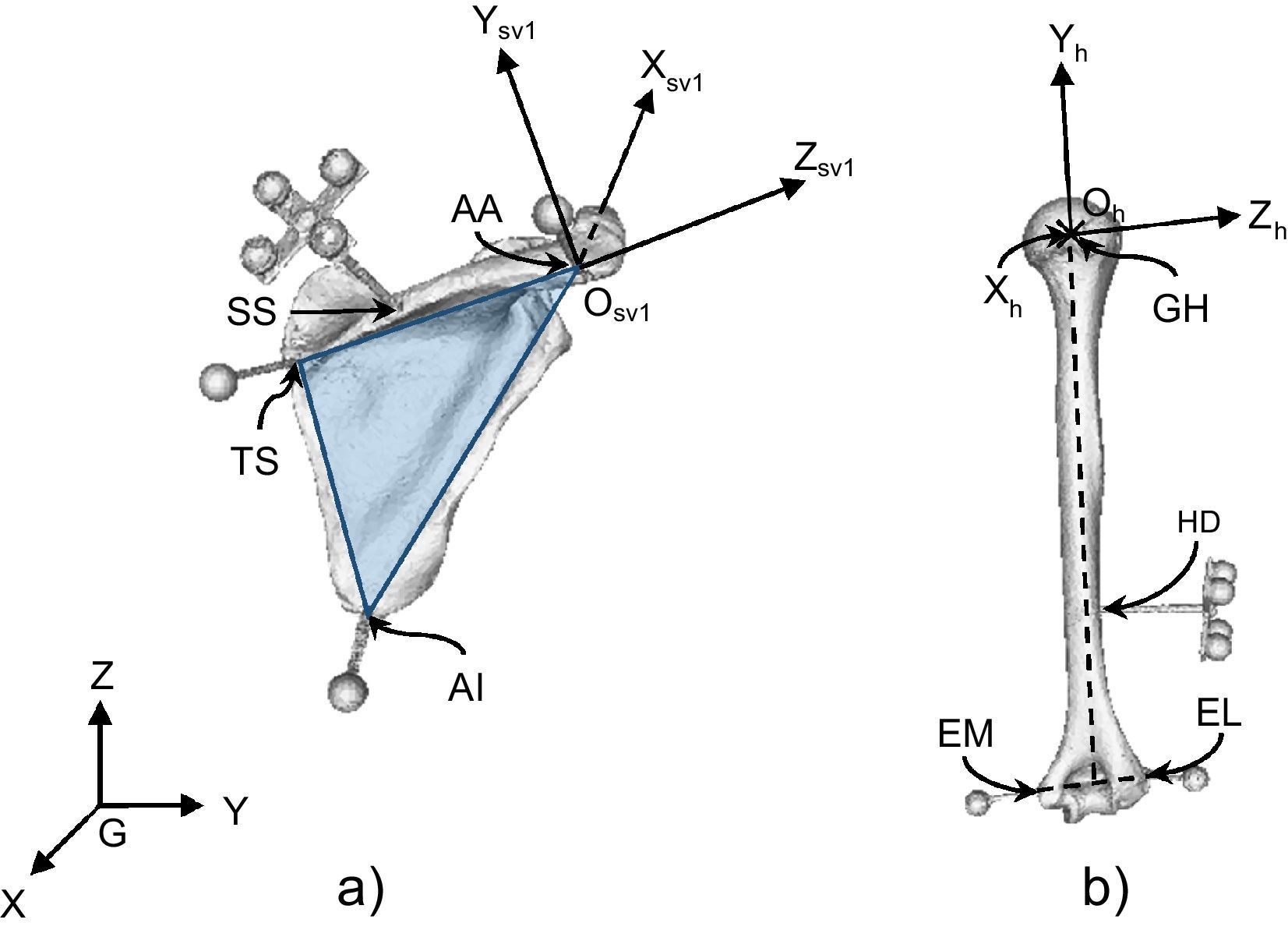
Durante la captura del movimiento, es posible que alguna parte del cuerpo se interponga entre las cámaras y los marcadores, provocando una pérdida de información. En el caso específico de la escápula, se utilizaron tres de los cuatro puntos recomendados para la colocación de los marcadores tomándose los puntos AA, TS y AI. La ubicación del marcador en forma de cruz fue determinada a partir de este comportamiento inicial, decidiéndose seleccionar un punto de mayor rigidez del plano de la escápula. Este punto fue el denotado como SS que cumple con lo recomendado en el párrafo anterior. Este punto adicional se encuentra colocado en el medio de la línea que conecta los puntos AA-TS (fig. 1a), de esta forma se permite recalcular la trayectoria de los otros marcadores cuando alguno esté oculto. En el caso del húmero, se usaron los puntos EL y EM según establece el ISB. El centro de la cabeza humeral (Caput Humeri) se estimó en base a la geometría asignándosele GH. Para facilitar la coherencia en la información, se le agregó otro pin HD con cuatro sensores, al igual que la escápula (fig. 1b). A cada sensor se le dio una numeración con el objetivo de identificar la trayectoria, obteniéndose una base de datos con la posición de los sensores en cada instante de tiempo. Como resultado de esta preparación se obtiene al sujeto listo para la adquisición de las Imágenes y Modelado 3D.
2.2Adquisición de las Imágenes y Modelado 3D Escápula, marcadores y elementos necesarios para construir su SCL. b) Húmero, marcadores y elementos para construir su SCL.")
El sujeto de muestra se sienta en una silla garantizándose que no exista desplazamiento del mismo durante los experimentos. Un técnico se encarga de realizar los movimientos del brazo, controlando trayectoria y velocidad en cada serie (fig. 2).

Se capturó el desplazamiento para cuatro movimientos diferentes, con un total de cinco repeticiones por movimiento. Los movimientos ejecutados fueron: Abducción con pronación (AB pro), cuyo movimiento consiste en elevar el brazo extendido a lo largo del hombro con la palma de la mano mirando abajo; Abducción con supinación (AB sup), similar al movimiento anterior, pero con la palma de la mano mirando a arriba; Extensión con pronación (ES pro), el movimiento se ejecuta con la palma de la mano mirando a arriba y levantando el brazo delante del cuerpo; y Extensión con supinación (ES sup), similar a la extensión con pronación, pero con la palma mirando a abajo.
La relación de posición de los sensores con respecto a la estructura ósea fue realizada a través del estudio de imágenes médicas. Las imágenes utilizadas para la reconstrucción 3D fueron obtenidas mediante la técnica de Tomografía Computarizada (TC), y se corresponde con la región anatómica del hombro derecho.
Las imágenes de la muestra están constituidas por 1160 cortes con 512×512 pixeles de resolución, lo que corresponde a un tamaño de vóxel de 0,97×0,97×1,0 mm3 y fueron adquiridas utilizando un escáner Siemens Sensation 16 con una energía: 120 Kvp y 238mA. Los modelos 3D de los huesos se obtuvieron utilizando un nuevo procedimiento de Segmentación-Reconstrucción de estructuras óseas desarrollado en la plataforma de software libre pyFormex (http://pyformex.org). Esta aplicación posee rutinas de trabajo que permiten la definición de estructuras óseas en modelos biomédicos [22]. En conjunto con la reconstrucción de los modelos óseos, se realiza la reconstrucción 3D de los marcadores, facilitando la asociación de los modelos 3D con los datos obtenidos de los sensores.
2.3Procesamiento de los datosUna vez obtenidos los Modelos 3D y la base de datos posicional, se procede a describir la cinemática de la articulación. Esto se realiza mediante la trasformación de la posición de los marcadores, en los vectores de posición y orientación de los Sistemas de Coordenadas Locales. Cada SCL se construye mediante la utilización de tres marcadores (figs. 1 y 3).
Para establecer los SCL óseos es necesario seguir los siguientes pasos:
- 1.
Definir un primer eje. Para ello se utilizan los puntos capturados por los sensores. Ejemplo: la línea que conecta los puntos TS y AA en la escápula (fig. 1a).
- 2.
Definir el plano de orientación. Esto se logra mediante la definición de un eje suplementario. Ejemplo: la línea que conecta los puntos AI y AA (fig. 1a).
- 3.
Definir un segundo eje perpendicular al plano de orientación.
- 4.
Determinar el eje perpendicular al plano que definen los primeros dos ejes.
- 5.
Construir la matriz de orientación.
Para el análisis cinemático del hombro, la ISB establece como requisito la alineación de los Sistemas de Coordenadas del húmero con la escápula. Como se mencionó en la introducción, existen dos formas de realizar esta alineación de los SCL; una matemáticamente y otra anatómicamente. En este estudio, se definen dos Sistemas de Coordenadas diferentes para la escápula, uno basado en la propuesta de la ISB y el otro alineado anatómicamente, que se denominarán a lo largo de este documento como Variante 1 (V1) y Variante 2 (V2), respectivamente.
2.3.1Sistema de Referencia de la Escápula Estándar (V1)La variante 1 para la escápula (SCLsv1) se definió siguiendo las recomendaciones de la ISB, colocando el origen de Coordenadas (Osv1) en el punto de intersección entre el pin AA y la escápula (fig. 1).
El eje Zsv1 se define mediante el vector que va del punto TS al punto AA
El eje Xsv1 se define perpendicular al plano formado por CG, AI y CMM
El eje Ysv1 se toma perpendicular al plano formado por Zsv1 y Xsv1Dado que los vectores se encuentran normalizados, el resultado es la matriz de rotación que permite pasar del Sistema Global SG al Sistema de Coordenadas Local SCLsv1 dondeEsta matriz contiene los tres vectores de dirección que definen el ángulo entre el eje local y los tres ejes del Sistema Global de Coordenadas (Rsv1=tres ejes o vectores de dirección). A continuación, se muestra la ecuación general para llevar del Sistema Global al SCL de la escápula en función del tiempo (t)2.3.2Sistema de Referencia de la Escápula Alineado Anatómicamente (V2)


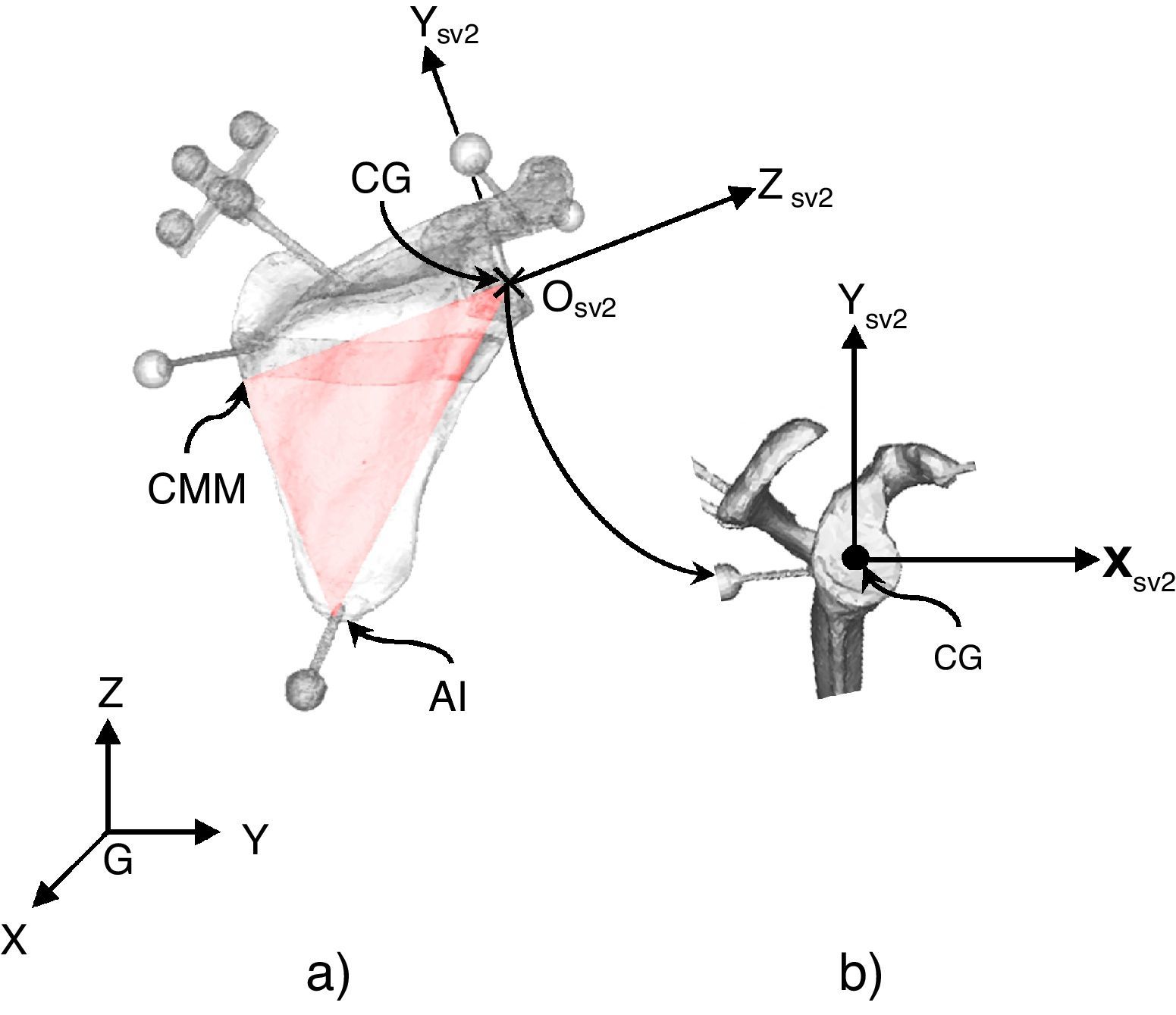
La variante 2 para la escápula (SCLsv2) se definió utilizando los puntos CG (Cavitas Glenoidalis), CMM (Comienzo del Margo Meg.) y AI (fig. 3). Estos puntos se escogieron con el objetivo de alinear el SCL con el plano interno de la escápula (Fossa ingraspinata) (fig. 3). El punto CG se coloca en el centro de la depresión en forma de copa de la articulación GlenoHumeral. En esta depresión, encaja la cabeza del húmero. Durante los movimientos, el Húmero rota pero también se desplaza. Asimismo, si se coloca el centro del SCL fuera de la esfera que describe la cabeza del Húmero, se describe una curva en forma de Trocoide. Si esta hipótesis es cierta, la mejor manera de describir su movimiento es mediante una esfera circunscrita, colocando un SCL en el centro (punto GH) y el otro SCL sobre el radio (punto CG), alineando el eje Zsv2 con el segmento de hueso, donde se presentan los mayores esfuerzos (CMM a CG) (fig. 3).
 Puntos necesarios para construir la segunda variante de SCL de la escápula. b) Vista frontal del Sistema (señalado la ubicación del punto CG).")
El origen de Coordenadas (Osv2) se ubicó en el punto CG facilitando de esta manera el cálculo de los desplazamientos. El eje Zsv2 se definió mediante el vector que va del punto CMM al punto CG
El eje Zsv2 se define perpendicular al plano formado por CG, AI y CMMEl eje Ysv1 se toma perpendicular al plano formado por Zsv2 y Xsv2El resto del proceso es similar al de la Variante 1 por lo que la ecuación general para la Variante 2 queda definida como:2.3.3Sistema de Referencia de Húmero


Utilizando como base el Sistema Global de Coordenadas SG, se define el SCL del húmero (fig. 1b). El SCL de húmero (SCLh) se encuentra definido con el origen de Coordenadas Oh en el punto GH.
El eje Zh se definió mediante la línea que conecta el punto EM y el punto EL, apuntando a EL
El eje Xh se toma perpendicular al plano formado por EL, EM y GHEl eje Yh se definió mediante la línea que conecta el punto medio entre EM y EL, y el punto GH apuntando a GHEl resto del proceso es similar al de la escápula por lo que la ecuación general para el SCL del Húmero queda definida como:2.3.4Determinación de los ángulos



El movimiento del Sistema de Coordenadas del húmero se ha medido con relación al Sistema de Coordenadas de la escápula. La matriz de transformación entre ambos Sistemas (función del tiempo) se muestra a continuación:
La rotaciones fueron descritas mediante el uso de los ángulos de Euler (secuencia YX’Y”), definiendo los movimientos relativos entre ambos Sistemas como:
- a)
Rotación γGH1 GH Plano de Elevación, a la rotación alrededor del eje Ys.
- b)
Rotación γGH2 GH Rotación Axial, a la rotación alrededor del eje Yh.
- c)
Rotación βGH1 Elevación del Húmero, a la rotación alrededor del eje Xh.
El análisis estadístico se realizó mediante la utilización del software libre pyFormex (v 0.8), implementándose rutinas para la representación dinámica de las articulaciones del cuerpo humano, así como el análisis cinemático de las mismas. Cabe destacar que todos estos movimientos del húmero se determinaron con relación a las dos variantes de SCL de la escápula para las cinco repeticiones. Se determina el error típico entre las repeticiones de cada movimiento y se evalúa la diferencia entre los promedios.
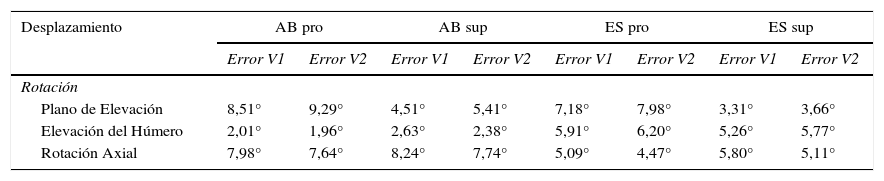
3Resultados y DiscusiónEn la tabla 1, se presenta el error típico para los desplazamientos del húmero con respecto a la escápula. Ambas variantes describieron de forma consistente el movimiento, con un error máximo de ±9.29°, encontrándose el menor margen de error en el cálculo de la Elevación del Húmero para los movimiento AB pro y AB sup.
Error típico para las dos variantes
| Desplazamiento | AB pro | AB sup | ES pro | ES sup | ||||
|---|---|---|---|---|---|---|---|---|
| Error V1 | Error V2 | Error V1 | Error V2 | Error V1 | Error V2 | Error V1 | Error V2 | |
| Rotación | ||||||||
| Plano de Elevación | 8,51° | 9,29° | 4,51° | 5,41° | 7,18° | 7,98° | 3,31° | 3,66° |
| Elevación del Húmero | 2,01° | 1,96° | 2,63° | 2,38° | 5,91° | 6,20° | 5,26° | 5,77° |
| Rotación Axial | 7,98° | 7,64° | 8,24° | 7,74° | 5,09° | 4,47° | 5,80° | 5,11° |
En todos los experimentos, el húmero se elevó como promedio unos 94° respecto a la escápula (partiendo de una posición inicial promedio de 20° respecto al tórax), detectándose pocas diferencias en los valores angulares de la elevación por ambas variantes. Estos valores están en correspondencia con los expresados por otros investigadores [9]. En el 2007, Annie Levasseur [21] realizó un experimento similar durante la aducción. Este estudio arrojó como resultado una variación poco significativa entre los movimientos descritos por ambas variantes, recomendando el estudio de movimientos más complejos del brazo. Nuestra investigación analiza los efectos de la ubicación de los SCL para desplazamientos más complicados, estudiando el comportamiento en otros planos de movimiento (Plano de Elevación y Rotación Axial).
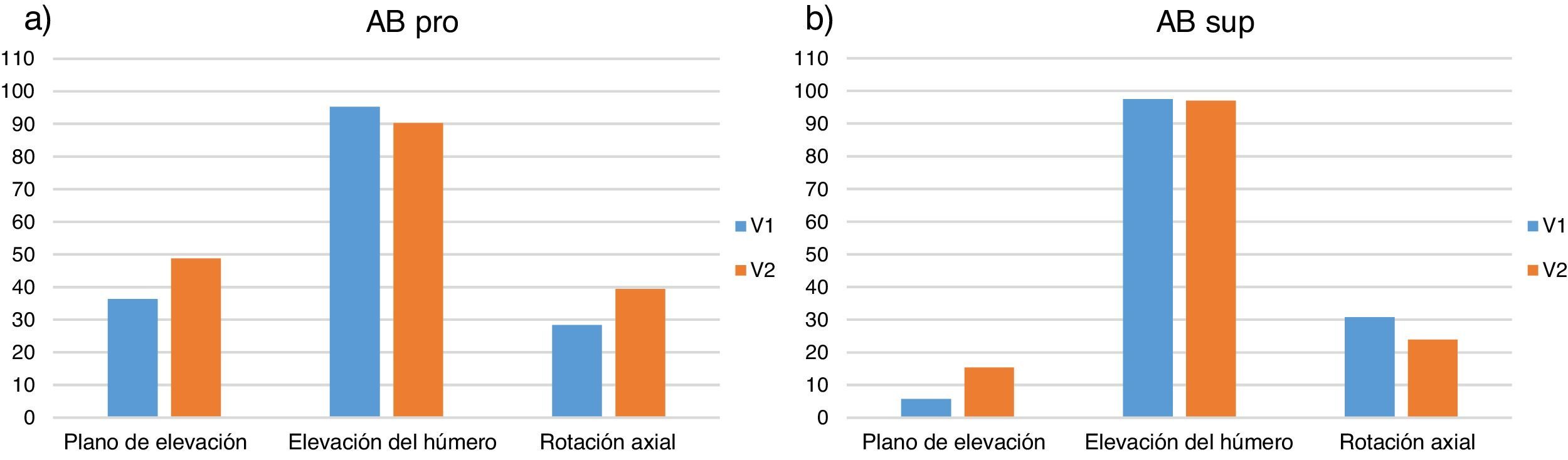
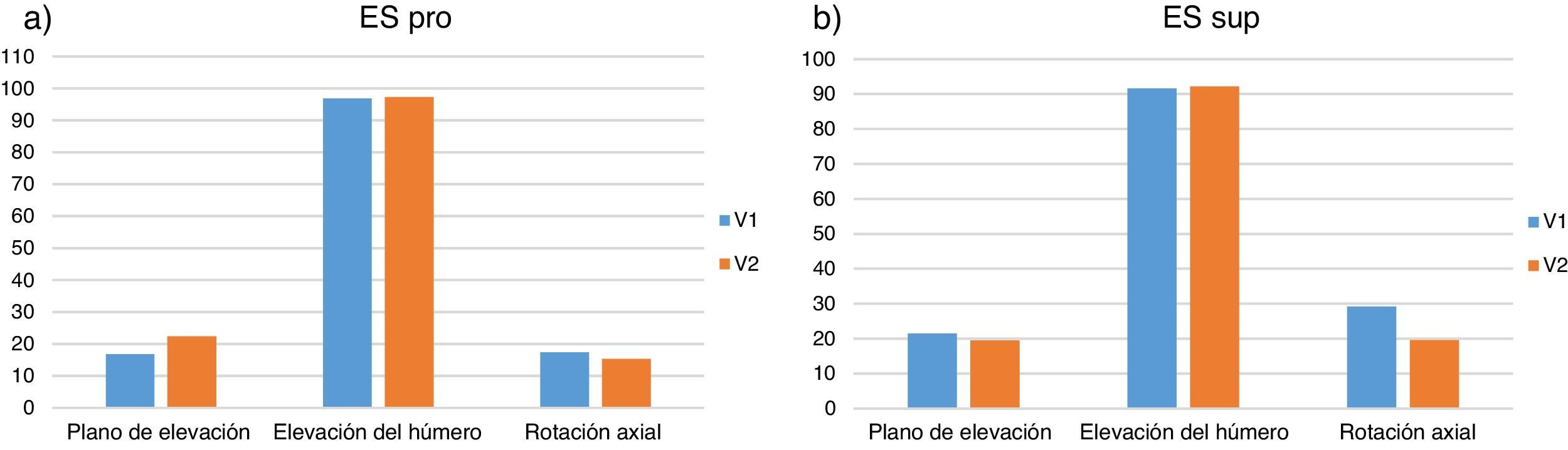
Los resultados obtenidos para los movimientos de Extensión con pronación (ES pro) y Extensión con supinación (ES sup) fueron muy similares en ambas variantes, tanto en los valores angulares como similitud en las curvas que describen el movimiento. No ocurrió así con la Abducción con pronación (AB pro) y Abducción con supinación (AB sup), donde aparecen las mayores diferencias angulares (figs. 4 y 5).
 Rangos de desplazamiento durante el movimiento AB pro. b) Rangos de desplazamiento durante el movimiento AB sup.")
 Rangos de desplazamiento durante el movimiento ES pro. b) Rangos de desplazamiento durante el movimiento ES sup.")
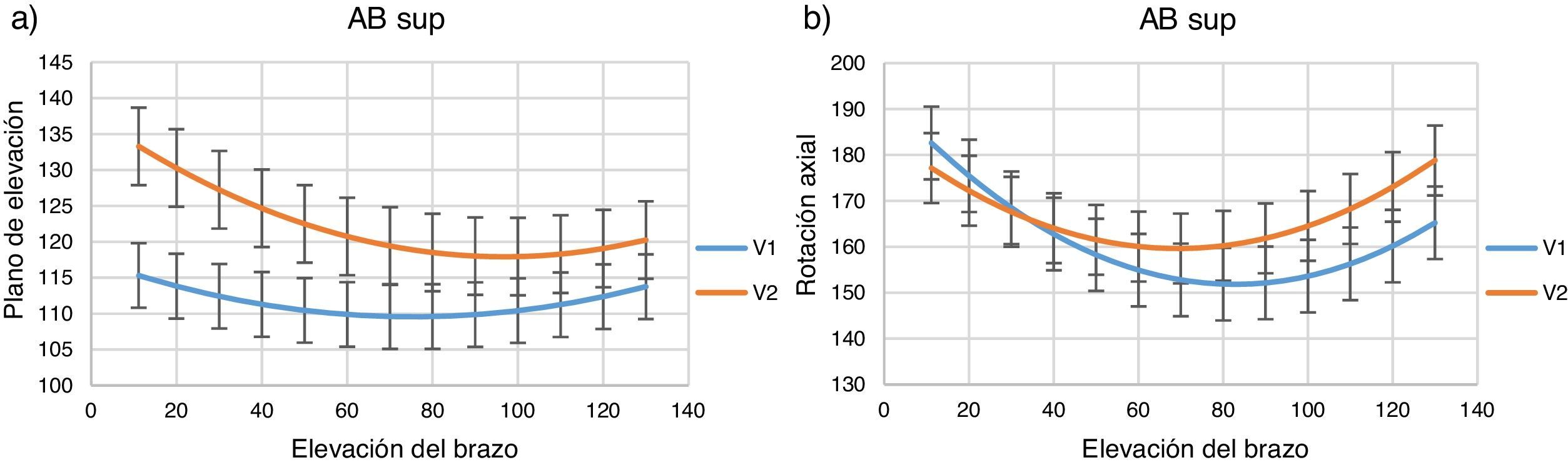
En el caso de los valores angulares de la posición para el Plano de Elevación y la Rotación Axial, se observan cambios entre las variantes (figs. 4–6). Los hallazgos mostraron una variación de los rangos de movimiento de 2°-12°. Esta discrepancia en los rangos de valores se debe a la diferente ubicación del origen e inclinación de los ejes de Coordenadas, sin embargo en ambas variantes se observa similitud en las curvas que describen el movimiento (fig. 6).
4Conclusiones Plano de Elevación durante el movimiento AB sup. b) Rotación Axial durante el movimiento AB sup.")
La aplicación del método invasivo permitió analizar la influencia de los Sistemas de Coordenadas Locales, en la interpretación de los valores cinemáticos de la articulación GlenoHumeral para diferentes movimientos del brazo. Se observó que, en el caso de la Abducción con pronación y Abducción con supinación, hay una variación de 2 a 12 grados en el Plano de Elevación y la Rotación Axial, entre el método de la ISB y el propuesto.