






La polipectomía transanal asistida por robot puede tener ventajas respecto a la cirugía laparoscópica transanal convencional. Evaluamos la seguridad, factibilidad y ventajas potenciales de esta técnica.
MétodosEntre febrero de 2014 y octubre de 2015, se realizaron un total de 9 polipectomías transanales en nuestro centro. Realizamos un estudio retrospectivo de datos recogidos prospectivamente referentes a las características de los pacientes, tumores tratados, resultados perioperatorios, informe anatomopatológico y morbimortalidad.
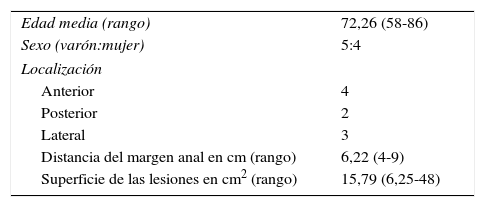
ResultadosFueron tratados 5 hombres y 4 mujeres mediante polipectomía robótica transanal. Las lesiones se encontraban a una distancia media de 6,2cm respecto al margen anal. La superficie media de las lesiones fue de 15,8 cm2. Todos los procedimientos fueron realizados en posición de litotomía, independientemente de la localización de la lesión. Se realizó cierre del defecto en todos los casos. El sangrado intraoperatorio medio fue de 39,8mL. El tiempo quirúrgico medio fue de 71,9 min. No se objetivaron complicaciones graves postoperatorias ni reingresos y la estancia mediana fue de 2,5 días.
ConclusionesLa polipectomía transanal asistida por robot es útil para tratar lesiones rectales complejas o voluminosas. Nuestra plataforma de acceso transanal permitió un amplio rango de movimientos con los pacientes en litotomía.
Robotic assisted transanal polipectomy may have advantages compared with the conventional transanal minimally invasive surgery technique. We evaluate the safety, feasibility and advantages of this technique.
MethodsBetween February 2014 and October 2015, 9patients underwent robotic transanal polypectomy. We performed a retrospective study in which we analyse prospectively collected data regarding patient and tumor characteristics, perioperative outcomes, pathological report, morbidity and mortality.
ResultsA total of 5 male and 4 female patients underwent robotic TAMIS. Lesions were 6,22cm from the anal verge. Mean size was 15,8cm2. All procedures were performed in the lithotomy position. Closure of the defect was performed in all cases. Mean blood loss was 39,8ml. Mean operative time was 71,9min. No severe postoperative complications or readmissions occured. Median hospital stay was 2,5 days.
ConclusionsRobotic TAMIS is useful to treat complex rectal lesions. Our transanal platform allowed a wider range of movements of the robotic arms and to perform all procedures in the lithotomy position.
La microcirugía endoscópica transanal (TEM) introducida por el Dr. Gerhard Buess hace más de 30 años1 ha demostrado ser superior a la escisión convencional transanal para la resección de tumores rectales, principalmente por su capacidad para realizar resecciones de gran calidad2,3. Langer et al. mostraron mejores resultados oncológicos a largo plazo cuando compararon 54 resecciones mediante TEM con resecciones transanales convencionales. Al comparar los resultados durante un periodo de 17 años, entre TEM y resección transanal convencional, de Graaf et al. encontraron una menor tasa de fragmentación, recurrencia y morbilidad del TEM, con mayores tasas de márgenes de resección negativos4,5. A pesar de todo esto, la TEM no ha sido adoptada de forma generalizada, dada su compleja curva de aprendizaje y el costo del equipamiento necesario6.
La cirugía transanal mínimamente invasiva (TAMIS) es una técnica novedosa desarrollada por Atallah et al.7 como una técnica híbrida entre la TEM y la cirugía laparoscópica de incisión única para la resección de lesiones rectales. La TAMIS fue diseñada en una plataforma asequible para muchos cirujanos y hospitales, que da acceso a lesiones rectales bajas a todo cirujano con habilidades laparoscópicas avanzadas familiarizado con la cirugía rectal.
Las indicaciones de la TAMIS son similares a las del TEM o el abordaje transanal convencional8. La TAMIS debería ser considerada en pacientes con tumores benignos o T1, bien seleccionados entre aquellos con factores de buen pronóstico y en los que el riesgo de afectación ganglionar sea bajo9.
Aunque la TAMIS se encuentre aún en fase de desarrollo, ha sido explorada de forma amplia a nivel mundial, con más de 30 estudios retrospectivos hasta la fecha que cubren más de 400 procedimientos10. La TAMIS se ha demostrado como factible en lesiones benignas y en lesiones malignas en estadio inicial bien seleccionadas en el recto medio e inferior y es una alternativa prometedora a la TEM11.
Existen ciertas limitaciones a la hora de realizar la TAMIS. Los instrumentos laparoscópicos convencionales deben ser utilizados en un campo quirúrgico limitado como es la luz rectal. En este campo, los ángulos de trabajo y la triangulación pueden verse afectados de forma importante. En ocasiones, es necesario cambiar los puertos de acceso de la cámara por los de trabajo, y viceversa. Estas restricciones de espacio obligan a forzar en ocasiones la angulación de acceso del puerto de trabajo en la TAMIS o a mover de forma constante la orientación del puerto de trabajo en el TEM. Estos cambios pueden hacer oscilar el neumorrecto, haciendo el procedimiento más tedioso y complicado técnicamente. En algunos casos, el propio puerto de trabajo puede ser expulsado de la luz rectal debido a estas oscilaciones en la presión. Los ángulos cerrados de trabajo y la necesidad de cambio de posición de instrumentos o de la cámara hacen en ocasiones imprescindible la presencia de un asistente experimentado en este tipo de procedimientos o de un segundo cirujano experto12.
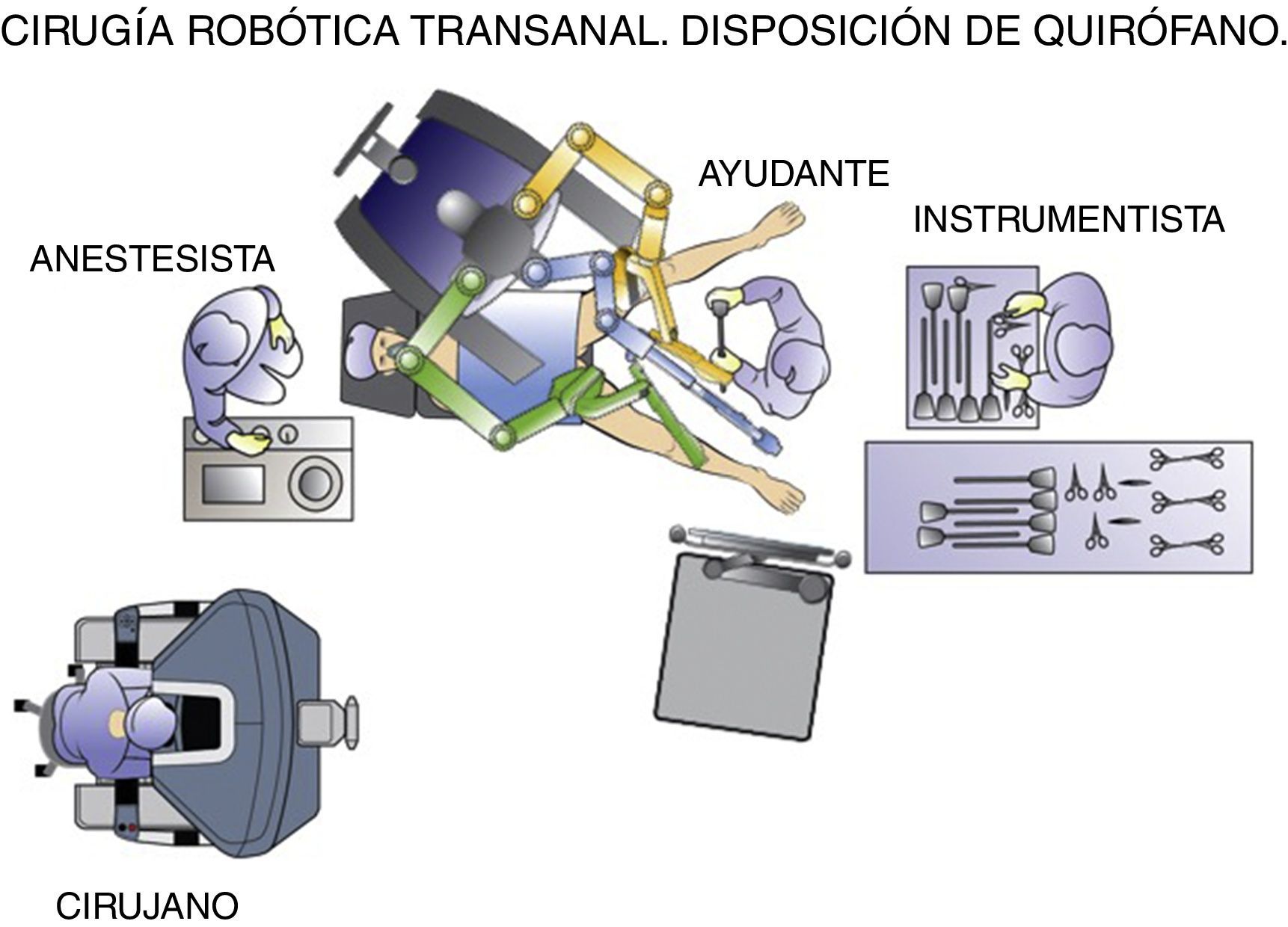
Quizá la mejor forma de expresar la ventaja que aporta el robot quirúrgico da Vinci (Intuitive Surgical, Sunnyvale, CA, EE. UU.) sea que permite al cirujano realizar la intervención en un campo quirúrgico claro, con una imagen 3D magnificada y con unos instrumentos articulados libres de transmisión del temblor. Estas características deberían minimizar las dificultades propias de la cirugía endoluminal13. En los procedimientos asistidos por robot, el cirujano puede estar en una posición ergonómica en la consola mientras que el ayudante se encuentra al lado del paciente (fig. 1). El control de la cámara por el ayudante deja de ser un problema, ya que este lo realiza el propio cirujano desde la consola. En el caso concreto de la cirugía transanal asistida por robot, este instrumento facilita la disección de la pared rectal en los ángulos deseados y el cierre del defecto tras la polipectomía. Las suturas y el anudado son facilitados de forma clara con la asistencia robótica. Todos estos motivos hacen que la cirugía robótica transanal sea un campo de gran interés.

La experiencia en cirugía robótica transanal para la escisión local de lesiones es aún muy limitada14-20. Existen muy pocas publicaciones y casi todas ellas con un número de casos pequeño. En un momento en el que la técnica no está aún estandarizada, presentamos nuestra experiencia inicial tras una serie de casos.
El objetivo del presente estudio es definir los resultados postoperatorios y oncológicos de nuestra serie inicial de casos de polipectomía robótica transanal e identificar los potenciales beneficios de esta vía de abordaje.
MétodosSe realiza un estudio retrospectivo de 9pacientes con lesiones rectales que fueron intervenidos de forma consecutiva mediante cirugía robótica transanal entre febrero de 2014 y octubre de 2015. Todos los pacientes firmaron un consentimiento informado específico de TAMIS y se siguieron las guías de buena práctica clínica de nuestra institución. La utilización del puerto de acceso transanal y de cirugía robótica transanal para la escisión de tumores rectales fue aprobada por el Comité Ético de nuestra región, también fue aprobada la realización del estudio retrospectivo sobre la base de datos recogida de forma prospectiva.
En nuestro centro, la indicación para TAMIS se realiza de forma rutinaria para lesiones rectales benignas o neoformaciones rectales T1 con criterios de buen pronóstico en los que el riesgo de metástasis ganglionares es escaso. En los casos de lesiones con dudas diagnósticas entre T1 y T2 sin sospecha de metástasis ganglionares, la TAMIS se emplea como «biopsia escisional», seguida del tratamiento adecuado al informe anatomopatológico definitivo, en caso de ser necesario. Todos los pacientes son estudiados de forma preoperatoria mediante colonoscopia, tomografía computarizada toracoabdominopélvica y resonancia magnética nuclear. La ecografía endorrectal se emplea cuando las lesiones son accesibles al ecógrafo transanal rígido. Todos los pacientes reciben profilaxis antibiótica y tromboembólica. La decisión de realizar o no preparación mecánica del intestino se realiza en función de las preferencias del cirujano y de las posibilidades de penetrar o no en la cavidad peritoneal durante la resección transanal del pólipo.
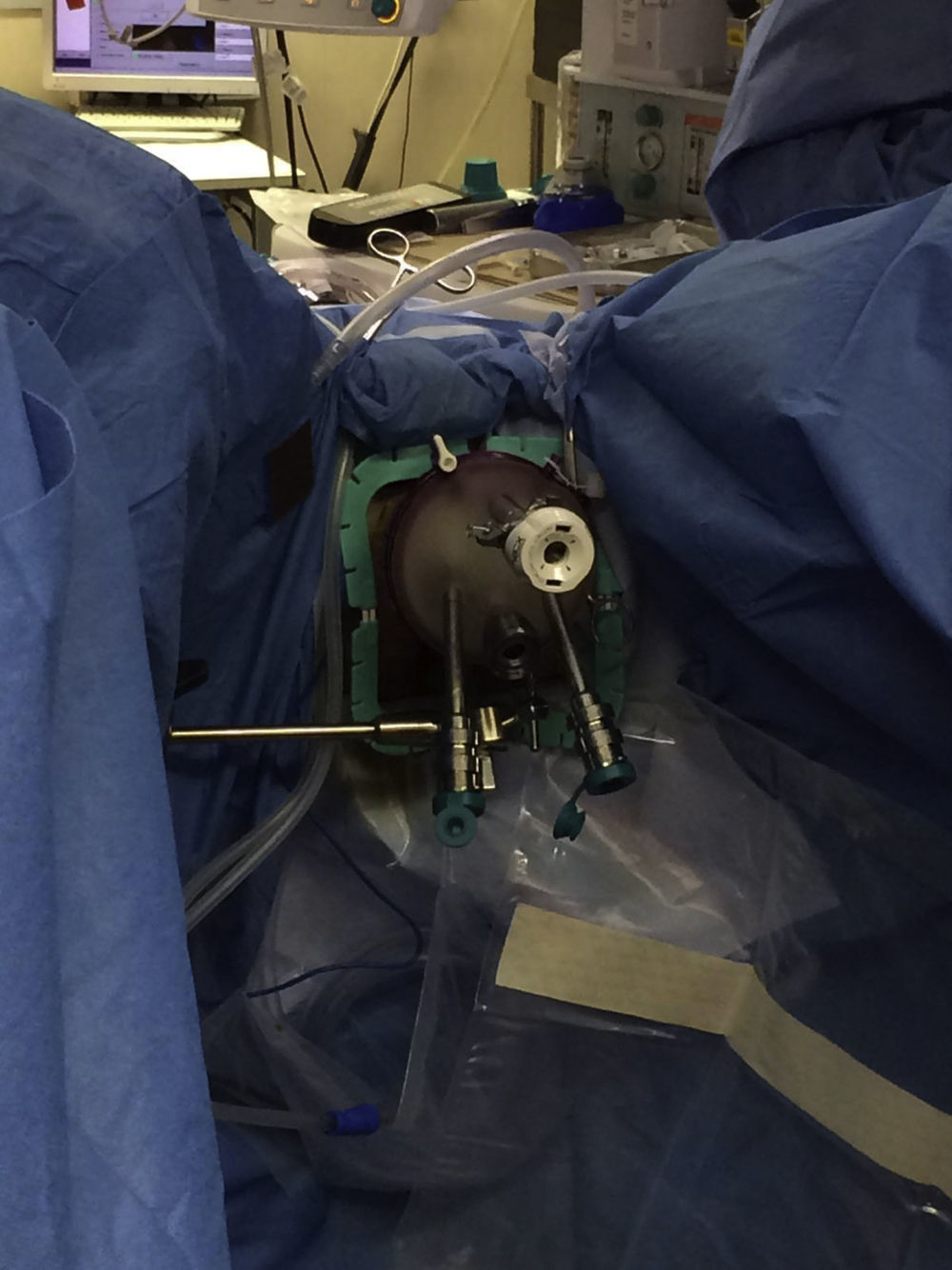
Los procedimientos fueron realizados bajo anestesia general con relajación muscular profunda con el fin de evitar los «movimientos respiratorios» de la luz rectal. Todos los pacientes fueron intervenidos en posición de litotomía con perneras bajas, independientemente de la localización de la lesión rectal. Ocasionalmente se colocó a los pacientes con un ligero Trendelenburg cuando esto fue necesario. El puerto de acceso empleado fue el puerto de acceso transanal (PAT) (Developia, Santander, España) fijado a la mesa quirúrgica mediante un arco de fijación articulado (Karl Storz, GmbH, Tuttlingen, Alemania). El PAT fue cubierto en su parte externa mediante el GelPoint (Applied Medical, Rancho Santa Margarita, CA, EE. UU.). Un trocar convencional de 12mm fue colocado en la parte alta del GelPoint para la óptica del robot. Dos trocares de 8mm para la introducción de los instrumentos robóticos a través de los brazos 1 y 2 se colocaron a cada lado del GelPoint y un trocar adicional en la parte baja del GelPoint para el asistente. Este último fue preferiblemente un trocar de 8mm para el sistema de insuflación AirSeal (Conmed, Utica, NY, EE. UU.) (fig. 2). En el brazo robótico 2 se empleó una pinza fenestrada bipolar y en el brazo 1 se utilizó la tijera monopolar. El neumorrecto se mantuvo entre 10 y 15mmHg, bien mediante el sistema de insuflación convencional o mediante el AirSeal (Conmed, Utica, NY, EE. UU.). El carro del sistema quirúrgico da Vinci Si (Intuitive Surgical, Sunnyvale, CA, EE. UU.) se ancló al paciente desde el lateral izquierdo y sobre la pierna izquierda (fig. 3).

.")
La disección de las lesiones rectales se realizó con la tijera monopolar; la pinza bipolar fue empleada para una hemostasia adecuada. Se tomó especial cuidado en mantener la disección perpendicular a la pared rectal con el fin de asegurar una resección de espesor completo alejada del margen de las lesiones. Se cerró el defecto de la resección en todos los casos con una o varias suturas continuas con monofilamento reabsorbible de 3ceros. Se empleó un porta robótico en el brazo 1 y la pinza fenestrada bipolar en el brazo 2 para la sutura de la pared rectal. El espécimen fue analizado en nuestro laboratorio de Anatomía Patológica. En el postoperatorio se siguió un protocolo de recuperación multimodal, en el que la dieta fue reintroducida el mismo día de la intervención y los pacientes recibieron el alta sin complicaciones el segundo día postoperatorio.
El seguimiento se realizó en nuestras consultas externas mediante rectoscopia rígida desde las 3 semanas postoperatorias y consecutivamente cada 3 meses. En los casos en los que se sospechó recaída local, se realizó una biopsia mediante rectoscopia rígida en la consulta. Durante el seguimiento en consultas se valoraron los resultados funcionales mediante el Clevelan Clinic Incontinence Score.
Se registraron prospectivamente los siguientes ítems: edad, sexo, tamaño de la lesión, localización de la lesión, distancia del margen anal, sangrado intraoperatorio, cierre del defecto, duración de la intervención, morbilidad, estancia mediana, readmisión y mortalidad.
En lo referente a la evaluación preoperatoria, se presentan los datos medios de edad, tamaño de la lesión y distancia de margen anal con rangos. Respecto a los resultados intraoperatorios se presenta la media de sangrado intraoperatorio y la media de la duración de la intervención con rangos. Se presentan la media y mediana de la estancia postoperatoria.
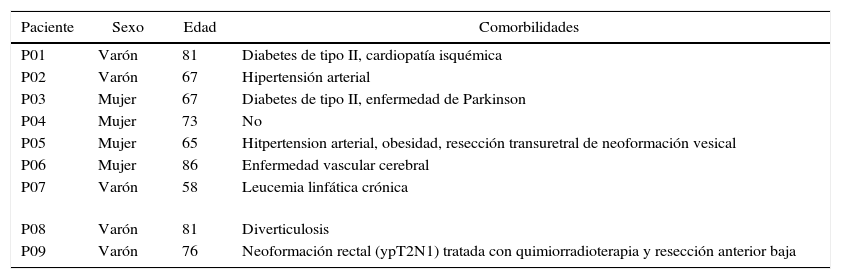
ResultadosSe realizó el procedimiento en 9pacientes sin necesidad de conversión a otra técnica. Las características demográficas de los pacientes y las características de las lesiones se detallan en las tablas 1-4.
Características demográficas y comorbilidades preoperatorias
| Paciente | Sexo | Edad | Comorbilidades |
|---|---|---|---|
| P01 | Varón | 81 | Diabetes de tipo II, cardiopatía isquémica |
| P02 | Varón | 67 | Hipertensión arterial |
| P03 | Mujer | 67 | Diabetes de tipo II, enfermedad de Parkinson |
| P04 | Mujer | 73 | No |
| P05 | Mujer | 65 | Hitpertension arterial, obesidad, resección transuretral de neoformación vesical |
| P06 | Mujer | 86 | Enfermedad vascular cerebral |
| P07 | Varón | 58 | Leucemia linfática crónica |
| P08 | Varón | 81 | Diverticulosis |
| P09 | Varón | 76 | Neoformación rectal (ypT2N1) tratada con quimiorradioterapia y resección anterior baja |
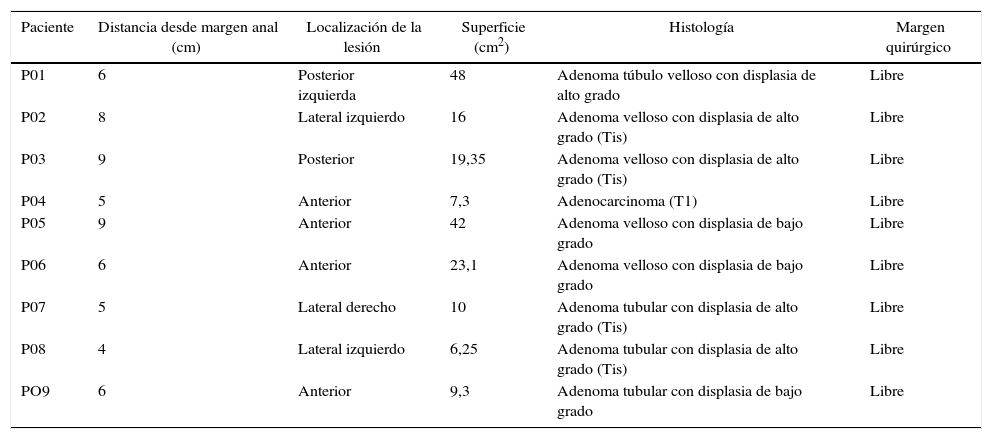
Resultados anatomopatológicos
| Paciente | Distancia desde margen anal (cm) | Localización de la lesión | Superficie (cm2) | Histología | Margen quirúrgico |
|---|---|---|---|---|---|
| P01 | 6 | Posterior izquierda | 48 | Adenoma túbulo velloso con displasia de alto grado | Libre |
| P02 | 8 | Lateral izquierdo | 16 | Adenoma velloso con displasia de alto grado (Tis) | Libre |
| P03 | 9 | Posterior | 19,35 | Adenoma velloso con displasia de alto grado (Tis) | Libre |
| P04 | 5 | Anterior | 7,3 | Adenocarcinoma (T1) | Libre |
| P05 | 9 | Anterior | 42 | Adenoma velloso con displasia de bajo grado | Libre |
| P06 | 6 | Anterior | 23,1 | Adenoma velloso con displasia de bajo grado | Libre |
| P07 | 5 | Lateral derecho | 10 | Adenoma tubular con displasia de alto grado (Tis) | Libre |
| P08 | 4 | Lateral izquierdo | 6,25 | Adenoma tubular con displasia de alto grado (Tis) | Libre |
| PO9 | 6 | Anterior | 9,3 | Adenoma tubular con displasia de bajo grado | Libre |
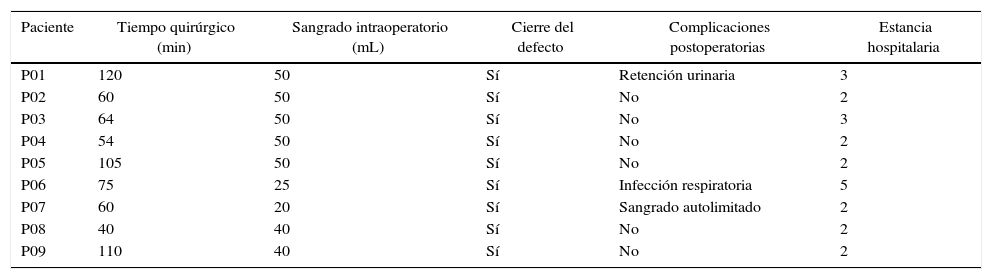
Resultados perioperatorios
| Paciente | Tiempo quirúrgico (min) | Sangrado intraoperatorio (mL) | Cierre del defecto | Complicaciones postoperatorias | Estancia hospitalaria |
|---|---|---|---|---|---|
| P01 | 120 | 50 | Sí | Retención urinaria | 3 |
| P02 | 60 | 50 | Sí | No | 2 |
| P03 | 64 | 50 | Sí | No | 3 |
| P04 | 54 | 50 | Sí | No | 2 |
| P05 | 105 | 50 | Sí | No | 2 |
| P06 | 75 | 25 | Sí | Infección respiratoria | 5 |
| P07 | 60 | 20 | Sí | Sangrado autolimitado | 2 |
| P08 | 40 | 40 | Sí | No | 2 |
| P09 | 110 | 40 | Sí | No | 2 |
El defecto se cerró en todos los casos intervenidos en nuestra serie. El sangrado medio intraoperatorio fue de 39,8mL (20-50mL). El tiempo quirúrgico empleado para este tipo de procedimientos incluyendo el tiempo de anclaje del robot fue de 71,9 min (40-120). No se observaron complicaciones intraoperatorias. En el periodo postoperatorio, se observaron como complicaciones una retención urinaria y una infección respiratoria (ambas Clavien II). Otro paciente presentó un sangrado postoperatorio autolimitado que no requirió transfusiones ni intervenciones quirúrgicas (Clavien I). No fueron necesarios los reingresos ni se realizó ninguna reintervención. La estancia media de los pacientes fue de 2 días (1-5 días) y la mediana de 2,5 días. No se observó mortalidad.
Durante los procedimientos se emplearon los siguientes instrumentos robóticos: una tijera monopolar, la pinza fenestrada bipolar y un porta robótico. El coste del instrumental por procedimiento ascendió a 1.165,1 €. El PAT se desarrolló en conjunto con Developia y es esterilizable, por lo que no tuvo un coste para el hospital. El GelPoint y el Airseal tienen un coste conjunto de 555 €. Por lo tanto, el gasto total en fungible ascendió a 1.720,1 €, sin considerar la inversión inicial en el sistema quirúrgico.
En el estudio anatomopatológico, no se observó fragmentación de las lesiones y todos los casos presentaron bordes libres de resección. La superficie media de las lesiones fue de 15,79cm2. De los pacientes, 8 presentaban pólipos adenomatosos (4 de ellos con displasia de alto grado [Tis]). En un caso se observó un adenocarcinoma infiltrante con criterios de buen pronóstico que se consideró correctamente tratado.
Durante un seguimiento medio de 18 meses (15-23 meses) no se observaron alteraciones funcionales ni recaídas locales. A los 6 meses de seguimiento postoperatorio el Clevelan Clinic Incontinence Score fue 0 en los 9pacientes.
DiscusiónEn la actualidad el número de resecciones locales para el tratamiento del cáncer de recto precoz con criterios de buen pronóstico está experimentando un importante incremento, dada la baja tasa de complicaciones postoperatorias comparadas con la resección anterior de recto21, el menor número de alteraciones funcionales22 y la posibilidad de preservar no solo el esfínter anal sino todo el recto23. La resección transanal convencional está limitada para la mayoría de los cirujanos a tumores de menos de 4cm de diámetro y que se localicen entre los 6-8cm desde el margen anal24. Este abordaje se asocia a dificultades de acceso, menor precisión, dificultades en la visualización, mayores tasas de recaída local y tasas menores de supervivencia libre de enfermedad. Se ha hipotetizado que la visualización subóptima sea la principal causa del incremento del riesgo de márgenes afectos y fragmentación tumoral25. La TEM ha mostrado unos resultados oncológicos excelentes a largo plazo como tratamiento curativo de los carcinomas rectales precoces sin criterios de alto riesgo cuando se realiza una resección de espesor completo. En los carcinomas de alto riesgo, el tratamiento mediante la TEM de forma aislada debería ser valorado solo como tratamiento paliativo26.
En la actualidad, existen 2puertos de acceso transanal aprobados por la Food and Drug Administration en EE. UU.: para la TAMIS, el puerto SILS (Medtronics, Minneapolis, EE. UU.) y el Gelpoint path (Applied Medical, Rancho Santa Margarita, EE. UU.)27. Ambos puertos son fácilmente insertables por vía transanal y permiten la insuflación para el neumorrecto a través de un canal propio. La instrumentación necesaria para la intervención son los instrumentos laparoscópicos convencionales que podemos encontrar en el quirófano habitualmente.
La TAMIS tiene indicación hoy en día para la resección de lesiones rectales benignas o malignas precoces con criterios de buen pronóstico. Las lesiones localmente avanzadas o con criterios de mal pronóstico en el tercio medio o inferior rectal requieren una escisión total mesorrectal bien por vía anterior (resección anterior baja) o por vía transanal (escisión total mesorrectal transanal). En los casos en los que exista afectación esfinteriana, se considerará la amputación abdominoperineal como la técnica de elección para estos pacientes, salvo que las comorbilidades contraindiquen la cirugía mayor2. Existen también otras posibles indicaciones de la TAMIS como es la resección de cicatrices residuales tras quimiorradioterapia en el tratamiento de neoformaciones rectales localmente avanzadas con el fin de confirmar la respuesta clinicopatológica completa (ypT0)28-30.
Aunque la TAMIS ha sido utilizada para resecar lesiones rectales a lo largo de todo el recto, probablemente su mejor indicación sea para la resección de lesiones en el tercio medio e inferior. La versatilidad de la TAMIS permite también realizar tratamiento de fístulas rectovaginales/rectouretrales, hemostasia de sangrados digestivos bajos o la extracción de cuerpos extraños. Probablemente la indicación más interesante y prometedora a día de hoy sea la escisión total mesorrectal transanal en los pacientes con pelvis complejas (pelvis estrecha, próstatas grandes, obesidad…)31.
Los puertos disponibles hoy en día para la TAMIS y aprobados por la Food and Drug Administration no permiten en todos los pacientes un buen acceso para el procedimiento32. Por otra parte, existen determinados casos en los que la TAMIS sigue siendo un procedimiento complicado técnicamente debido al volumen o la localización de la lesión, que obligan a la colocación del paciente en posiciones que complican el procedimiento desde el punto de vista anestésico.
Las ventajas potenciales de la cirugía robótica transanal incluyen la excelente ergonomía, la magnificación 3D de la imagen, la eliminación del temblor, el filtrado para movimientos precisos y los instrumentos articulados con múltiples grados de libertad de movimiento. Todas estas características hacen que los instrumentos robóticos sean instrumentos superiores a los convencionales para trabajar en espacios limitados donde los conflictos entre los instrumentos y la cámara son frecuentes e implican interrupciones en el flujo del procedimiento, así como en su precisión31. Atallah et al. publicaron su experiencia inicial en cirugía robótica transanal en un modelo cadáver12 y concluyeron que es una técnica factible y que permite el cierre de defectos de una forma sencilla y rápida. Hompes et al. también publicaron la factibilidad de esta técnica empleando el sistema quirúrgico da Vinci (Intuitive Surgical, Sunnyvale, CA, EE. UU.) y el Glove port33.
Desde nuestro punto de vista, y tras nuestra experiencia inicial, esta técnica tiene también al menos otras 2ventajas potenciales como son la de tener un instrumento extra manejado por el ayudante por vía transanal, así como la de facilitar el aprendizaje cuando se dispone de una doble consola. Estas ventajas y las mencionadas previamente hacen de la cirugía robótica transanal una técnica muy prometedora.
Como principal inconveniente, hemos observado que el gasto en fungible es superior al habitual. El gasto global de 1.720,1 € por procedimiento en fungible incluye tanto el puerto como el sistema de insuflación, comunes a cualquier procedimiento TAMIS, si bien es cierto que el gasto por instrumental es claramente superior al de esta técnica realizada con un instrumento de energía laparoscópico convencional.
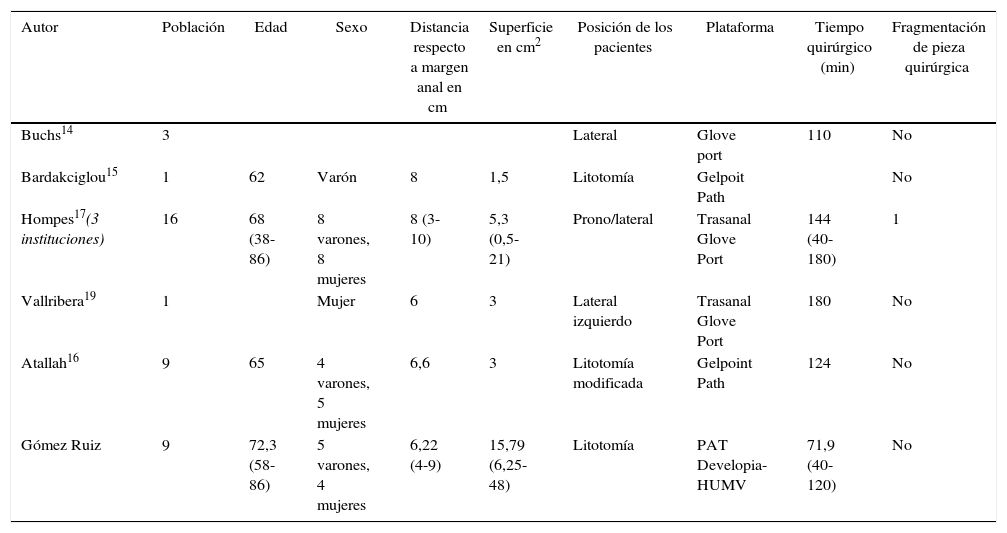
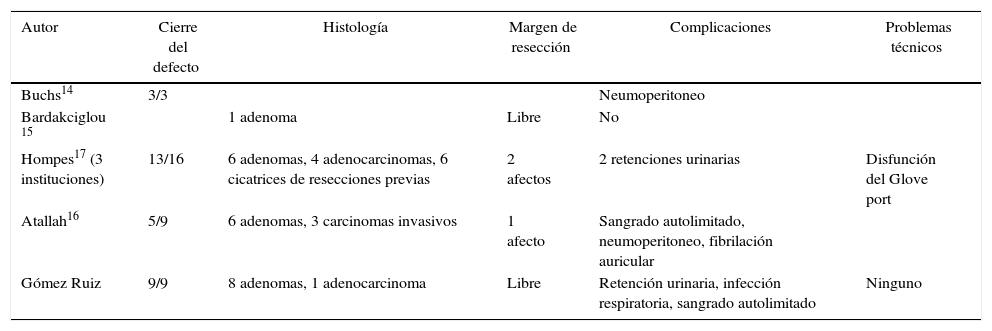
Hasta la fecha son pocas las publicaciones referentes a la polipectomía transanal asistida por robot. Muchas de ellas son casos clínicos aislados o series de menos de 5 casos. Existen diferentes puertos de acceso que se han empleado hasta la fecha; el más usado es el Glove port17. Hompes et al. han publicado la experiencia de 3instituciones con un total de 16 casos. En esta publicación describen las dificultades técnicas que han encontrado con el Glove port, principalmente relacionadas con la fuga del neumorrecto, que obligó a recolocar el puerto en varias ocasiones. Buchs et al. también refieren haber empleado el Glove port. Bardakcioglu et al. publicaron su experiencia en un paciente con un pólipo plano de 1,5cm de diámetro a 8cm del margen anal15. Atallah ha publicado una experiencia similar a la nuestra en 9pacientes20. La posición del paciente sobre la mesa quirúrgica ha ido variando en las distintas publicaciones y se podría ver este como uno de los inconvenientes de la técnica, al tener que adaptar la posición del paciente al sistema quirúrgico da Vinci Si. En la experiencia de Atallah y Bardkcioglu la posición elegida fue la de litotomía modificada. Otros, en cambio, han empleado el decúbito lateral para vencer las dificultades mencionadas del anclaje del robot al paciente14,17,19. En nuestra serie, el puerto empleado ha sido el PAT desarrollado en nuestra institución mediante una colaboración con los ingenieros de Developia. Este puerto nos ha permitido también, como hemos publicado en esta misma publicación científica y en otras34-36, realizar la escisión total mesorrectal transanal con asistencia robótica en pacientes con cáncer de recto localmente avanzado. Una de las ventajas que vemos a la utilización de esta técnica con este puerto es que hemos podido operar todos los casos en posición de litotomía, con el consiguiente beneficio que comporta para el paciente, desde el punto de vista anestésico. En las tablas 5 y 6 comparamos nuestra serie con la de otros grupos. Nuestro tiempo quirúrgico ha sido menor que el del resto de los grupos y nuestra resección del espécimen ha sido completa, sin fraccionamiento en todos los casos, a diferencia de la experiencia presentada por Hompes et al.17. Se cerró el defecto también en todos los casos, a diferencia de otras series17,20. Además, nuestros márgenes de resección fueron libres en todos los casos, a diferencia de la serie multicéntrica de Hompes, que presenta 3 casos con borde afecto17, o la de Atallah, que presenta bordes afectos en 3 de 9 casos20. Nuestra serie presenta un tamaño de lesiones significativamente mayor que el de otras series, tal y como mostramos en la tabla comparativa, con una tasa de complicaciones y un tipo de complicaciones leves Clavien I-II.
Revisión de la literatura y datos demográficos comparativos
| Autor | Población | Edad | Sexo | Distancia respecto a margen anal en cm | Superficie en cm2 | Posición de los pacientes | Plataforma | Tiempo quirúrgico (min) | Fragmentación de pieza quirúrgica |
|---|---|---|---|---|---|---|---|---|---|
| Buchs14 | 3 | Lateral | Glove port | 110 | No | ||||
| Bardakciglou15 | 1 | 62 | Varón | 8 | 1,5 | Litotomía | Gelpoit Path | No | |
| Hompes17(3 instituciones) | 16 | 68 (38-86) | 8 varones, 8 mujeres | 8 (3-10) | 5,3 (0,5-21) | Prono/lateral | Trasanal Glove Port | 144 (40-180) | 1 |
| Vallribera19 | 1 | Mujer | 6 | 3 | Lateral izquierdo | Trasanal Glove Port | 180 | No | |
| Atallah16 | 9 | 65 | 4 varones, 5 mujeres | 6,6 | 3 | Litotomía modificada | Gelpoint Path | 124 | No |
| Gómez Ruiz | 9 | 72,3 (58-86) | 5 varones, 4 mujeres | 6,22 (4-9) | 15,79 (6,25-48) | Litotomía | PAT Developia-HUMV | 71,9 (40-120) | No |
Revisión de la literatura. Resultados perioperatorios e histológicos comparativos
| Autor | Cierre del defecto | Histología | Margen de resección | Complicaciones | Problemas técnicos |
|---|---|---|---|---|---|
| Buchs14 | 3/3 | Neumoperitoneo | |||
| Bardakciglou 15 | 1 adenoma | Libre | No | ||
| Hompes17 (3 instituciones) | 13/16 | 6 adenomas, 4 adenocarcinomas, 6 cicatrices de resecciones previas | 2 afectos | 2 retenciones urinarias | Disfunción del Glove port |
| Atallah16 | 5/9 | 6 adenomas, 3 carcinomas invasivos | 1 afecto | Sangrado autolimitado, neumoperitoneo, fibrilación auricular | |
| Gómez Ruiz | 9/9 | 8 adenomas, 1 adenocarcinoma | Libre | Retención urinaria, infección respiratoria, sangrado autolimitado | Ninguno |
A la vista de estos datos, pensamos que las polipectomías transanales asistidas por robot empleando nuestro puerto PAT son factibles, seguras y presentan las siguientes ventajas: permiten realizar resecciones de pólipos de gran tamaño en litotomía independientemente de la localización, con una resección quirúrgica adecuada, sin complicaciones postoperatorias severas y con un tiempo quirúrgico adecuado. Los resultados funcionales a medio plazo son los equivalentes a los mostrados con TAMIS mediante otros puertos en la literatura.
Los pacientes con pólipos voluminosos o en cara anterior a los que queramos evitar el prono por motivos anestésicos o por comorbilidades son los que se presentarían como la principal indicación del abordaje robótico transanal. Es posible que estos casos técnicamente más demandantes justifiquen el incremento de gasto que implica, dados los resultados observados. En nuestro centro se realizan unas 12 resecciones transanales al año, de las cuales, la mitad aproximadamente tuvieron la indicación mencionada. El desarrollo de técnicas avanzadas de exéresis endoscópica hace que cada vez sean menos los pacientes con pólipos de pequeño tamaño que son remitidos por los endoscopistas para su resección por vía TAMIS y son más, en porcentaje, los casos que resultan técnicamente demandantes.
La optimización y abaratamiento de los costes de esta técnica, incluida la mejora del puerto de acceso, del diseño de nuevos instrumentos y de una cámara flexible, aumentarán la reproducibilidad y estandarización de esta técnica. Pensamos que son necesarios estudios prospectivos y aleatorizados que evalúen el coste-eficacia de esta vía de abordaje para esta indicación.
Conflicto de interesesEl Dr. M. Gómez Ruiz colabora como proctor y consultor en cirugía robótica con Intuitive Surgical, Abex y Medtronic.
Los autores agradecen a los profesionales del Hospital Universitario Marqués de Valdecilla y al Servicio Cántabro de Salud la apuesta permanente por el desarrollo de la cirugía robótica colorrectal, así como el apoyo mostrado a los diversos proyectos de investigación en esta área.
A nuestras familias.

